Paper:
Exploiting Mitigation Capabilities of a Variable-Stiffness Joint to Allow Agile Contact with Surfaces
Helio Nonose, Yuki Fukada, and Yasumichi Aiyama

University of Tsukuba
1-1-1 Tennodai, Tsukuba, Ibaraki 305-8573, Japan

The motion patterns typically exhibited by a robot manipulator during a pick-and-place task differ from those by a human. Humans often perform that movement in a manner that resembles a collision while still placing the object safely. This research proposes implementing a fast but rough contact motion by utilizing a series elastic actuator (SEA) on the robot’s joints to introduce compliance. Exploiting the impact mitigation of the SEA allows for high contact velocities while keeping safe values of contact force. The proposed method refrains from controlling the link’s actual position and utilizes contact with the environment to actively attenuate oscillations. The contact forces are limited and attenuated by designing the target position of the motor, joint stiffness, and velocity of the link. Simulation and preliminary results verify the capability of the SEA in mitigating impacts and limiting contact forces. In addition, the influence of each variable over the contact force and settling time is analyzed. Improvements over previous work on a variable-stiffness SEA mechanism based on compressed air are implemented. The proposed method is evaluated through simulation and experiments with a one-link arm. Results demonstrated the feasibility of the method, however, parameter settings need to be investigated.
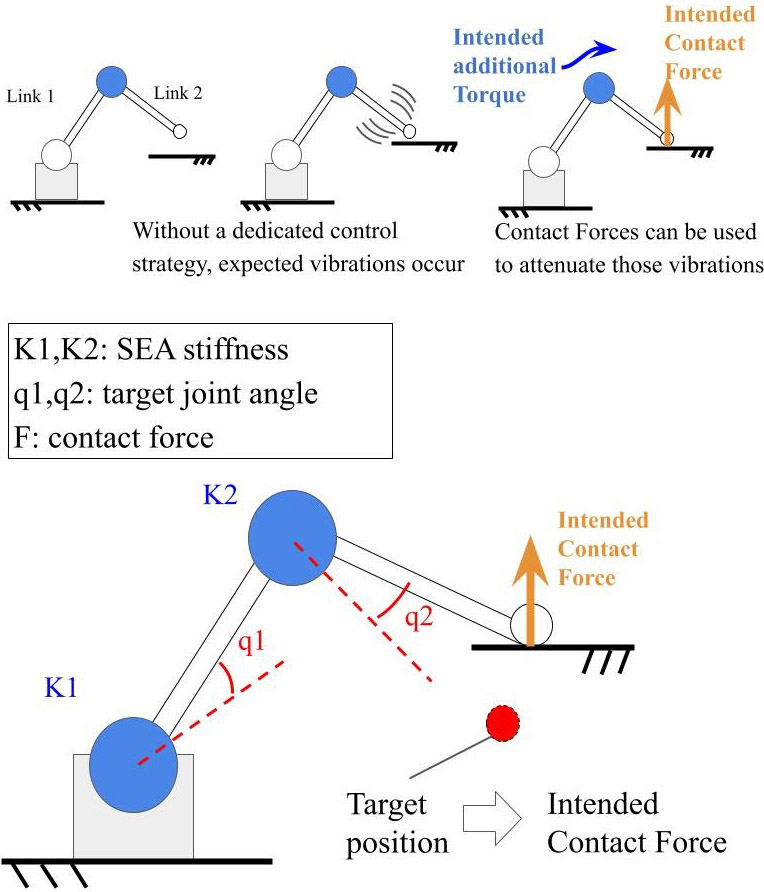
Concept of the proposed method for contact motion
- [1] M. Suomalainen, Y. Karayiannidis, and V. Kyrki, “A survey of robot manipulation in contact,” Robotics and Autonomous Systems, Vol.156, Article No.104224, 2022. https://doi.org/10.1016/j.robot.2022.104224
- [2] D. Tommasino, G. Cipriani, A. Doria, and G. Rosati, “Effect of end-effector compliance on collisions in robotic teleoperation,” Applied Sciences, Vol.10, Article No.9077, 2020. https://doi.org/10.3390/app10249077
- [3] B. Ugurlu, P. Forni, C. Doppmann, E. Sariyildiz, and J. Morimoto, “Stable control of force, position, and stiffness for robot joints powered via pneumatic muscles,” IEEE Trans. on Industrial Informatics, Vol.15, No.12, pp. 6270-6279, 2019. https://doi.org/10.1109/TII.2019.2916228
- [4] C. C. Beltran-Hernandez, D. Petit, I. G. Ramirez-Alpizar, and K. Harada, “Variable compliance control for robotic peg-in-hole assembly: A deep-reinforcement-learning approach,” Appl. Sci., Vol.10, Article No.6923, 2020. https://doi.org/10.3390/app10196923
- [5] M. Nishiura, A. Hatano, K. Nishii, and Y. Okumatsu, “Development of low-inertia backdrivable arm focusing on learning-based control,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 9642-9649, 2022. https://doi.org/10.1109/IROS47612.2022.9981337
- [6] G. Gulletta, W. Erlhagen, and E. Bicho, “Human-like arm motion generation: A review,” Robotics, Vol.9, No.4, Article No.102, 2020. https://doi.org/10.3390/robotics9040102
- [7] E. Costa, E. Silva, M. F. Costa, J. P. Araújo, D. Machado, L. Louro, W. Erlhagen, and E. Bicho, “Towards human-like bimanual movements in anthropomorphic robots: A nonlinear optimization approach,” Applied Mathematics and Information Sciences, Vol.9, pp. 619-629, 2015.
- [8] F. Zacharias, C. Schlette, F. Schmidt, C. Borst, J. Rossmann, and G. Hirzinger, “Making planned paths look more human-like in humanoid robot manipulation planning,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1192-1198, 2011. https://doi.org/10.1109/ICRA.2011.5979553
- [9] B. Vanderborght, A. Albu-Schäeffer, A. Bicchi, E. Burdet, D. G. Caldwell, R. Carloni, M. Catalano, O. Eiberger, W. Friedl, G. Ganesh, M. Garabini, M. Grebenstein, G. Grioli, S. Haddadin, H. Höppner, A. Jafari, M. Laffranchi, D. Lefeber, F. Petit, and S. Wolf, “Variable impedance actuators: A review,” Robotics and Autonomous Systems, Vol.61, pp. 1601-1614, 2013. https://doi.org/10.1016/j.robot.2013.06.009
- [10] A. Bicchi and G. Tonietti, “Fast and “soft-arm” tactics [robot arm design],” IEEE Robot. Autom. Mag., Vol.11, No.2, pp. 22-33, 2004. https://doi.org/10.1109/MRA.2004.1310939
- [11] S. Song, X. Zeng, Y. She, J. Wang, and H.-J. Su, “Modeling and control of inherently safe robots with variable stiffness links,” Robotics and Autonomous Systems, Vol.120, Article No.103247, 2019. https://doi.org/10.1016/j.robot.2019.07.017
- [12] Y. Aiyama, K. Tadokoro, and Y. Fujimori, “Variable stiffness mechanism with compressed air for robot SEA joint device,” 49th Int. Symp. on Robotics, 2017.
- [13] A. B. Alhassan , X. Zhang, H. Shen, H. Xu, K. Hamza, and G. Masengo, “Precise motion control of a power line inspection robot using hybrid time delay and state feedback control,” Frontiers in Robotics and AI, Vol.9, Article No.746991, 2022. https://doi.org/10.3389/frobt.2022.746991
- [14] International Organization for Standardization, “Robots and robotic devices – Collaborative robots,” 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.