Paper:
Friction Parameter Identification and Feedforward Compensation for Joint Motors in Lower Limb Rehabilitation Robots
Aihui Wang*
 , Xiang Zhang*, Hengyi Li*
, Shengda Gao**
, and Jinkang Dong*
, Xiang Zhang*, Hengyi Li*
, Shengda Gao**
, and Jinkang Dong*
*School of Automation and Electrical Engineering, Zhongyuan University of Technology
No.41 Zhongyuan Road, Zhengzhou 450007, China
**Ritsumeikan University
1-1-1 Nojihigashi, Kusatsu, Shiga 525-8577, Japan

The inherent nonlinear characteristics of friction adversely affects the control accuracy of joint motor drive systems in lower limb rehabilitation robots. Recognizing this challenge, this study proposes an improved friction model and further designs a feedforward compensation control scheme to mitigate motor friction on the basis of the friction model. Compensating for motor control utilizing the friction model, typically the Stribeck friction model, is a promising solution. To overcome the inherent limitation discontinuities of the Stribeck friction model, this study introduces an improved friction model by incorporating the sigmoid function into it. The friction parameter of the model is identified based on the data collected during the experiment, specifically the motor velocity and current. And to enhance the precision of the parameter identification, Kalman filtering algorithm is applied to mitigate the Gaussian noise generated during the experiment. Subsequently, the firefly algorithm is employed for offline identification and curve fitting of the friction parameters in the improved model. Based on the improved friction model, a feedforward compensation controller is further designed by integrating the traditional three-closed-loop PID motor control method with real-time friction compensation. The system employs humanoid gait patterns as input signals to achieve precise position tracking of the robot’s joint motors. Compared with the conventional PID control, the proposed feedforward compensation control reduces both position and current tracking errors. These results confirm that the feedforward compensation strategy, based on the refined Stribeck friction model, effectively mitigates the adverse effects of nonlinear friction, thereby improving the control performance of joint motor drive systems.
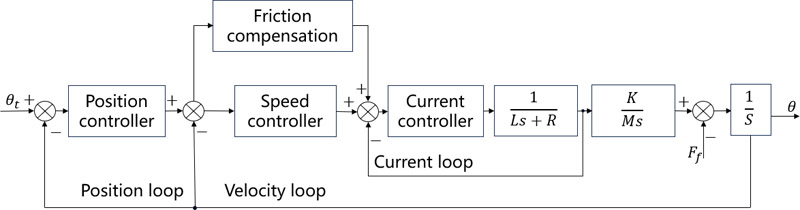
Feedforward compensation controller
- [1] S. Bhardwaj, A. A. Khan, and M. Muzammil, “Lower limb rehabilitation robotics: The current understanding and technology,” Work, Vol.69, No.3, pp. 775-793, 2021. https://doi.org/10.3233/WOR-205012
- [2] X. Zhang, Z. Yue, and J. Wang, “Robotics in lower-limb rehabilitation after stroke,” Behavioural Neurology, Vol.2017, No.1, pp. 1-13, 2017. https://doi.org/10.1155/2017/3731802
- [3] D. Shi, W. Zhang, W. Zhang et al., “A review on lower limb rehabilitation exoskeleton robots,” Chinese J. of Mechanical Engineering, Vol.32, No.1, pp. 1-11, 2019. https://doi.org/10.1186/s10033-019-0389-8
- [4] I. Virgala, P. Frankovský, and M. Kenderová, “Friction effect analysis of a DC motor,” American J. of Mechanical Engineering, Vol.1, No.1, pp. 1-5, 2013. https://doi.org/10.12691/ajme-1-1-1
- [5] C.-J. Lin, H.-T. Yau, and Y.-C. Tian, “Identification and compensation of nonlinear friction characteristics and precision control for a linear motor stage,” IEEE/ASME Trans. on Mechatronics, Vol.18, No.4, pp. 1385-1396, 2012. https://doi.org/10.1109/TMECH.2012.2202679
- [6] H. Chaoui and P. Sicard, “Adaptive fuzzy logic control of permanent magnet synchronous machines with nonlinear friction,” IEEE Trans. on Industrial Electronics, Vol.59, No.2, pp. 1123-1133, 2011. https://doi.org/10.1109/TIE.2011.2148678
- [7] G. Liu, “Decomposition-based friction compensation of mechanical systems,” Mechatronics, Vol.12, No.5, pp. 755-769, 2002. https://doi.org/10.1016/S0957-4158(01)00010-1
- [8] F. Dai, X. Gao, S. Jiang et al., “A two-wheeled inverted pendulum robot with friction compensation,” Mechatronics, Vol.30, pp. 116-125, 2015. https://doi.org/10.1016/j.mechatronics.2015.06.011
- [9] J. Na, Q. Chen, X. Ren et al., “Adaptive prescribed performance motion control of servo mechanisms with friction compensation,” IEEE Trans. on Industrial Electronics, Vol.61, No.1, pp. 486-494, 2013. https://doi.org/10.1109/TIE.2013.2240635
- [10] T. Hoshina and M. Deng, “Friction compensation based coprime factorization for nonlinear systems,” 2024 Int. Conf. on Advanced Mechatronic Systems (ICAMechS), pp. 198-203, 2024. https://doi.org/10.1109/ICAMechS63130.2024.10818800
- [11] T. Tjahjowidodo, F. Al-Bender, and H. Van Brussel, “Friction identification and compensation in a DC motor,” IFAC Proc. Volumes, Vol.38, No.1, pp. 554-559, 2005. https://doi.org/10.3182/20050703-6-CZ-1902.00093
- [12] A. C. Bittencourt and S. Gunnarsson, “Static friction in a robot joint-modeling and identification of load and temperature effects,” J. of Dynamic Systems, Measurement, and Control, Vol.134, No.5, pp. 1-10, 2012. https://doi.org/10.1115/1.4006589
- [13] C. C. De Wit, H. Olsson, K. J. Astrom et al., “Dynamic friction models and control design,” 1993 American Control Conf., pp. 1920-1926, 1993. https://doi.org/10.23919/ACC.1993.4793212
- [14] F. Marques, P. Flores, J. C. Pimenta Claro et al., “A survey and comparison of several friction force models for dynamic analysis of multibody mechanical systems,” Nonlinear Dynamics, Vol.86, No.3, pp. 1407-1443, 2016. https://doi.org/10.1007/s11071-016-2999-3
- [15] J. Yao, W. Deng, and Z. Jiao, “Adaptive control of hydraulic actuators with LuGre model-based friction compensation,” IEEE Trans. on Industrial Electronics, Vol.62, No.10, pp. 6469-6477, 2015. https://doi.org/10.1109/TIE.2015.2423660
- [16] L. Lu, B. Yao, Q. Wang et al., “Adaptive robust control of linear motors with dynamic friction compensation using modified LuGre model,” Automatica, Vol.45, No.12, pp. 2890-2896, 2009. https://doi.org/10.1016/j.automatica.2009.09.007
- [17] C. Wang, J. Peng, and J. Pan, “A novel friction compensation method based on Stribeck model with fuzzy filter for PMSM servo systems,” IEEE Trans. on Industrial Electronics, Vol.70, No.12, pp. 12124-12133, 2023. https://doi.org/10.1109/TIE.2022.3232667
- [18] W. Liu, Y. X. Li, and H. R. Meng, “Friction torque measurement of servo mount based on Stribeck model,” Applied Mechanics and Materials, Vol.341, pp. 870-875, 2013. https://doi.org/10.4028/www.scientific.net/AMM.341-342.870
- [19] Q. Wang, Q. Zhang, Z. Wang et al., “Identification of Stribeck model parameters to accurately reveal stick–slip characteristics of a disc–block friction system,” Tribology Trans., Vol.66, No.6, pp. 1026-1042, 2023. https://doi.org/10.1080/10402004.2023.2262244
- [20] J. N. Rhee, Y. S. Chun, and J. Row, “A comparison between friction and frictionless mechanics with a new typodont simulation system,” American J. of Orthodontics and Dentofacial Orthopedics, Vol.119, No.3, pp. 292-299, 2001. https://doi.org/10.1067/mod.2001.112452
- [21] K. A. J. Verbert, R. Tóth, and R. Babuška, “Adaptive friction compensation: A globally stable approach,” IEEE/ASME Trans. on Mechatronics, Vol.21, No.1, pp. 351-363, 2015. https://doi.org/10.1109/TMECH.2015.2428995
- [22] H. T. Dinc, J.-K. Lee, and J.-H. Ryu, “Model-free energy-based friction compensation for industrial collaborative robots as haptic displays,” IEEE/ASME Trans. on Mechatronics, Vol.30, No.2, pp. 1038-1049, 2025. https://doi.org/10.1109/TMECH.2024.3410330
- [23] M. Mahvash and A. M. Okamura, “Friction compensation for a force-feedback telerobotic system,” Proc. of the 2006 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3268-3273, 2006.
- [24] L. Marton and B. Lantos, “Modeling, identification, and compensation of stick-slip friction,” IEEE Trans. on Industrial Electronics, Vol.54, No.1, pp. 511-521, 2007. https://doi.org/10.1109/TIE.2006.888804
- [25] L. Freidovich, A. Robertsson, A. Shiriaev et al., “LuGre-model-based friction compensation,” IEEE Trans. on Control Systems Technology, Vol.18, No.1, pp. 194-200, 2009. https://doi.org/10.1109/TCST.2008.2010501
- [26] L. Mostefai, M. Denaï, S. Oh et al., “Optimal control design for robust fuzzy friction compensation in a robot joint,” IEEE Trans. on Industrial Electronics, Vol.56, No.10, pp. 3832-3839, 2009. https://doi.org/10.1109/TIE.2009.2024101
- [27] L. Roveda, G. Pallucca, N. Pedrocchi et al., “Cartesian tasks oriented friction compensation through a reinforcement learning approach,” 2016 IEEE Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 895-900, 2016. https://doi.org/10.1109/AIM.2016.7576882
- [28] R. Ishibashi and L. Meng, “Automatic pruning rate adjustment for dynamic token reduction in vision transformer,” Applied Intelligence, Vol.55, No.5, pp. 1-15, 2025. https://doi.org/10.1007/s10489-025-06265-z
- [29] K. Arulkumaran, M. P. Deisenroth, M. Brundage et al., “Deep reinforcement learning: A brief survey,” IEEE Signal Processing Magazine, Vol.34, No.6, pp. 26-38, 2017. https://doi.org/10.1109/MSP.2017.2743240
- [30] J. Ren, A. Wang, H. Li et al., “A transformer-based neural network for gait prediction in lower limb exoskeleton robots using plantar force,” Sensors, Vol.23, No.14, Article No.6547, 2023. https://doi.org/10.3390/s23146547
- [31] W. Ruan, Q. Dong, X. Zhang et al., “Friction compensation control of electromechanical actuator based on neural network adaptive sliding mode,” Sensors, Vol.21, No.4, Article No.1508, 2021. https://doi.org/10.3390/s21041508
- [32] W.-H. Chen, D. J. Ballance, P. J. Gawthrop et al., “A nonlinear disturbance observer for robotic manipulators,” IEEE Trans. on Industrial Electronics, Vol.47, No.4, pp. 932-938, 2000. https://doi.org/10.1109/41.857974
- [33] Y. H. Kim and F. L. Lewis, “Reinforcement adaptive learning neural-net-based friction compensation control for high speed and precision,” IEEE Trans. on Control Systems Technology, Vol.8, No.1, pp. 118-126, 2000. https://doi.org/10.1109/87.817697
- [34] J. Ren, A. Wang, L. Meng et al., “Personalized gait generation using convolutional neural network for lower limb rehabilitation robots,” 2024 IEEE Int. Conf. on Real-time Computing and Robotics (RCAR), pp. 617-622, 2024. https://doi.org/10.1109/RCAR61438.2024.10670989
- [35] M. M. Maung, M. M. Latt, and C. M. Nwe, “DC motor angular position control using PID controller with friction compensation,” Int. J. of Scientific and Research Publications, Vol.8, No.11, pp. 149-155, 2018. https://doi.org/10.29322/IJSRP.8.11.2018.p8321
- [36] X. Lu, M. M. Khonsari, and E. R. M. Gelinck, “The Stribeck curve: Experimental results and theoretical prediction,” J. of Tribology, Vol.128, No.4, pp. 789-794, 2006. https://doi.org/10.1115/1.2345406
- [37] M. J. Deen and O. Marinov, “Noise in advanced electronic devices and circuits,” AIP Conf. Proc., pp. 3-12, 2005. https://doi.org/10.1063/1.2036687
- [38] Y. Kim and H. Bang, “Introduction to Kalman filter and its applications,” F. Govaers (Ed.), “Introduction and Implementations of the Kalman Filter,” pp. 1-16, IntechOpen, 2018.
- [39] X.-S. Yang and X. He, “Firefly algorithm: Recent advances and applications,” Int. J. of Swarm Intelligence, Vol.1, No.1, pp. 36-50, 2013. https://doi.org/10.1504/IJSI.2013.055801
- [40] J. Ren, A. Wang, Z. Ma et al., “Gait prediction for rehabilitation robots based on deep learning,” 2022 Int. Conf. on Advanced Mechatronic Systems (ICAMechS), pp. 86-90, 2022. https://doi.org/10.1109/ICAMechS57222.2022.10003463
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.