Paper:
Adaptive Formation Control of UAVs near Structures for Robust Localization and Efficient Task Execution
Masaya Haneda*
 , Yuki Funabora*
, Shinji Doki*
, and Kae Doki**
, Yuki Funabora*
, Shinji Doki*
, and Kae Doki**
*Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan
**Aichi Institute of Technology
1247 Yachigusa, Yakusa, Toyota, Aichi 470-0392, Japan

Accurate position estimation of unmanned aerial vehicles (UAVs) is essential for reliable and efficient task execution, such as the automated inspection of structures. However, localization is a significant challenge for UAVs in GNSS-denied spaces, such as under bridges, where satellite signals are obstructed. To address this issue, we employed a cooperative localization system consisting of a work-UAV, which performs tasks in the GNSS-denied space, and support-UAVs, which relatively localize the work-UAV. The critical challenge in this approach is the degradation of the GNSS-localization accuracy of the support-UAV owing to multipath effects, which are difficult to predict. This paper proposes an adaptive formation control method that enables support-UAVs to escape from multipath-affected spaces. Instead of focusing on signal processing or sensor fusion under multipath effects, our proposed system controls support-UAVs to escape from multipath-affected spaces where accurate GNSS-localization is difficult. This physical avoidance strategy enhances the robustness of the cooperative localization systems. Simulation results demonstrate the effectiveness of the proposed method. In two distinct scenarios, the average time spent by the support-UAV in multipath-affected spaces was reduced by 83.7% and 79.9%, respectively. Furthermore, the average task completion time was reduced by 37.6% and 14.3%, respectively.
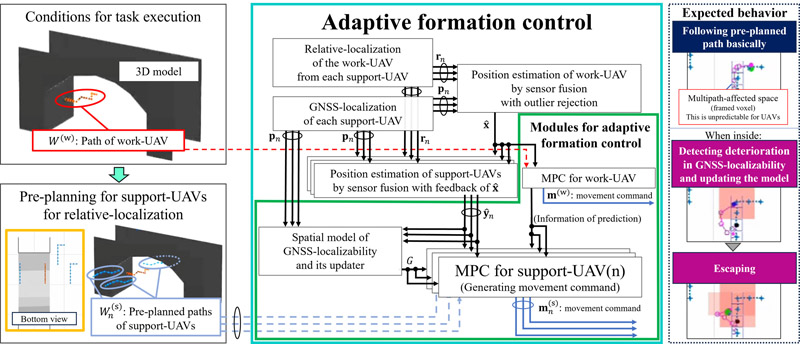
Overview of the proposed control method
- [1] P.-j. Chun, J. Dang, S. Hamasaki, R. Yajima, T. Kameda, H. Wada, T. Yamane, S. Izumi, and K. Nagatani, “Utilization of unmanned aerial vehicle, artificial intelligence, and remote measurement technology for bridge inspections,” J. Robot. Mechatron., Vol.32, No.6, pp. 1244-1258, 2020. https://doi.org/10.20965/jrm.2020.p1244
- [2] B. Alsadik and F. Nex, “The rise in UAV inspections for civil infrastructure,” GIM Int., 2021.
- [3] M. Rashidi and B. Samali, “Health monitoring of bridges using RPAs,” C. M. Wang, V. Dao, and S. Kitipornchai (Eds.), “EASEC16,” Lecture Notes in Civil Engineering, Vol.101, pp. 209-218, Springer, 2021. https://doi.org/10.1007/978-981-15-8079-6_20
- [4] J. L. Wells, B. Lovelace, and T. Kalar, “Use of unmanned aircraft systems for bridge inspections,” Transportation Research Record, Vol.2612, No.1, pp. 60-66, 2017. https://doi.org/10.3141/2612-07
- [5] H. W. Tong, B. Li, H. Huang, and C.-y. Wen, “UAV path planning for complete structural inspection using mixed viewpoint generation,” 2022 17th Int. Conf. on Control, Automation, Robotics and Vision (ICARCV), pp. 727-732, 2022. https://doi.org/10.1109/ICARCV57592.2022.10004359
- [6] C. Feng, H. Li, M. Zhang, X. Chen, B. Zhou, and S. Shen, “FC-planner: A skeleton-guided planning framework for fast aerial coverage of complex 3D scenes,” 2024 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 8686-8692, 2024. https:/10.1109/ICRA57147.2024.10610621
- [7] W. Wu, Y. Funabora, S. Doki, K. Doki, S. Yoshikawa, T. Mitsuda, and J. Xiang, “Evaluation and enhancement of resolution-aware coverage path planning method for surface inspection using unmanned aerial vehicles,” IEEE Access, Vol.12, pp. 16753-16766, 2024. https://doi.org/10.1109/ACCESS.2024.3359056
- [8] N. Gehri, J. Mata-Falcón, and W. Kaufmann, “Automated crack detection and measurement based on digital image correlation,” Construction and Building Materials, Vol.256, Article No.119383, 2020. https://doi.org/10.1016/j.conbuildmat.2020.119383
- [9] H. S. Munawar, A. W. Hammad, A. Haddad, C. A. P. Soares, and S. T. Waller, “Image-based crack detection methods: A review,” Infrastructures, Vol.6, No.8, Article No.115, 2021. https://doi.org/10.3390/infrastructures6080115
- [10] R. G. Lins and S. N. Givigi, “Automatic crack detection and measurement based on image analysis,” IEEE Trans. on Instrumentation and Measurement, Vol.65, No.3, pp. 583-590, 2016. https://doi.org/10.1109/TIM.2015.2509278
- [11] S. Czyża, K. Szuniewicz, K. Kowalczyk, A. Dumalski, M. Ogrodniczak, and L. Zieleniewicz, “Assessment of accuracy in unmanned aerial vehicle (UAV) pose estimation with the real-time kinematic (RTK) method on the example of DJI Matrice 300 RTK,” Sensors, Vol.23, No.4, Article No.2092, 2023. https://doi.org/10.3390/s23042092
- [12] Q. Shi, S. Zhao, X. Cui, M. Lu, and M. Jia, “Anchor self-localization algorithm based on uwb ranging and inertial measurements,” Tsinghua Science and Technology, Vol.24, No.6, pp. 728-737, 2019. https://doi.org/10.26599/TST.2018.9010102
- [13] Y. Higashi and K. Yamazaki, “Autonomous flight using UWB-based positioning system with optical flow sensors in a GPS-denied environment,” J. Robot. Mechatron., Vol.35, No.2, pp. 328-337, 2023. https://doi.org/10.20965/jrm.2023.p0328
- [14] M. Hirai, T. Mitsuda, and N. Kato, “Uavs that fly automatically with high precision in non-gnss environments—The industrial revolution in the sky: Next-generation drones as “flying robots—”,” J. of the Society of Mechanical Engineers, Vol.121, No.1200, pp. 24-25, 2018 (in Japanese). https://doi.org/10.1299/jsmemag.121.1200_24
- [15] S. Jung, D. Choi, S. Song, and H. Myung, “Bridge inspection using unmanned aerial vehicle based on HG-SLAM: Hierarchical graph-based SLAM,” Remote Sensing, Vol.12, No.18, Article No.3022, 2020. https://doi.org/10.3390/rs12183022
- [16] C. Campos, R. Elvira, J. J. G. Rodríguez, J. M. M. Montiel, and J. D. Tardós, “ORB-SLAM3: An accurate open-source library for visual, visual-inertial, and multimap slam,” IEEE Trans. on Robotics, Vol.37, No.6, pp. 1874-1890, 2021. https://doi.org/10.1109/TRO.2021.3075644
- [17] S. Suzuki, “Vision/ins/altimeter-based navigation and control for autonomous drones in indoor environments,” J. Robot. Mechatron., Vol.37, No.4, pp. 815-824, 2025. https://doi.org/10.20965/jrm.2025.p0815
- [18] K. Kimura, K. Maeda, K. Asa, Y. Funabora, S. Doki, and K. Doki, “UAV localization system with subsidiary UAVs for visual inspection,” Trans. of the Society of Instrument and Control Engineers, Vol.56, No.7, pp. 370-378, 2020 (in Japanese). https://doi.org/10.9746/sicetr.56.370
- [19] K. Kimura, Y. Funabora, S. Doki, and K. Doki, “Robust localization for inspection UAVs by integrating GNSS and relative positioning information,” 21th SICE System Integration Division Annual Conf. (SI2020), pp. 1197-1200, 2020 (in Japanese).
- [20] N. Kubo, K. Kobayashi, and R. Furukawa, “GNSS multipath detection using continuous time-series C/N_0,” Sensors, Vol.20, No.14, Article No.4059, 2020. https://doi.org/10.3390/s20144059
- [21] H.-F. Ng and L.-T. Hsu, “3D mapping database-aided GNSS RTK and its assessments in urban canyons,” IEEE Trans. on Aerospace and Electronic Systems, Vol.57, No.5, pp. 3150-3166, 2021. https://doi.org/10.1109/TAES.2021.3069271
- [22] T. Suzuki, D. Inoue, and Y. Amano, “Robust UAV position and attitude estimation using multiple GNSS receivers for laser-based 3D mapping,” 2019 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4402-4408, 2019. https://doi.org/10.1109/IROS40897.2019.8967894
- [23] S. Kato, M. Kitamura, T. Suzuki, and Y. Amano, “NLOS satellite detection using a fish-eye camera for improving GNSS positioning accuracy in urban area,” J. Robot. Mechatron., Vol.28, No.1, pp. 31-39, 2016. https://doi.org/10.20965/jrm.2016.p0031
- [24] N. Ohashi, Y. Funabora, S. Doki, and K. Doki, “Majority rule based sensor fusion system with correlation evaluation for mobile robot localization,” Trans. of the Society of Instrument and Control Engineers, Vol.55, No.7, pp. 439-446, 2019 (in Japanese). https://doi.org/10.9746/sicetr.55.439
- [25] Y. Jiang, Y. Funabora, S. Doki, and K. Doki, “Detection of multipath area and sequential path planning for robust localization of multiple UAVs working near structures,” 2022 JSME Conf. on Robotics and Mechatronics, Article No.1P1-G08, 2022 (in Japanese). https://doi.org/10.1299/jsmermd.2022.1P1-G08
- [26] J. Gutierrez, N. A. Neogi, D. Kaeli, and E. T. Dill, “A high-performance computing GNSS-aware path planning algorithm for safe urban flight operations,” AIAA AVIATION 2022 Forum, 2022. https://doi.org/10.2514/6.2022-3461.
- [27] A. Alyammahi, Z. Xu, I. Petrunin, B. Peng, and R. Grech, “Reinforcement learning for UAV path planning under complicated constraints with GNSS quality awareness,” Engineering Proc., Vol.88, No.1, Article No.66, 2025. https://doi.org/10.3390/engproc2025088066.
- [28] G. Zhang and L.-T. Hsu, “A new path planning algorithm using a GNSS localization error map for UAVs in an urban area,” J. of Intelligent & Robotic Systems, Vol.94, No.1, pp. 219-235, 2019. https://doi.org/10.1007/s10846-018-0894-5.
- [29] H. S. H. Go and H. H.-T. Liu, “Trajectory optimization for cooperatively localizing quadrotor UAVs,” 2024 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 11796-11803, 2024. https://doi.org/10.1109/ICRA57147.2024.10611620
- [30] T. K. Tasooji and R. Parasuraman, “Distributed fault-tolerant multi-robot cooperative localization in adversarial environments,” 2025 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2025. https://doi.org/10.1109/IROS60139.2025.11246042
- [31] W. Zhang, B. Teague, and F. Meyer, “Active planning for cooperative localization: A fisher information approach,” 2022 56th Asilomar Conf. on Signals, Systems, and Computers, pp. 795-800, 2022. https://doi.org/10.1109/IEEECONF56349.2022.10051872
- [32] R. B. Langley, “Dilution of precision,” GPS World, Vol.10, No.5, pp. 52-59, 1999.
- [33] C. Rajasekhar, V. B. S. S. I. Dutt, and G. S Rao, “Investigation of best satellite–receiver geometry to improve positioning accuracy using GPS and IRNSS combined constellation over Hyderabad region,” Wireless Personal Communications, Vol.88, No.2, pp. 385-393, 2016. https://doi.org/10.1007/s11277-015-3126-3
- [34] Z. Xue, Z. Lu, Z. Xiao, J. Song, and S. Ni, “Overview of multipath mitigation technology in global navigation satellite system,” Frontiers in Physics, Vol.10, Article No.1071539, 2022. https://doi.org/10.3389/fphy.2022.1071539.
- [35] S. D. Conte and C. de Boor, “Elementary Numerical Analysis: An Algorithmic Approach,” 3rd ed., McGraw-Hill, 1980.
- [36] T. M. Inc., “fmincon – find minimum of constrained nonlinear multivariable function – MATLAB.” https://www.mathworks.com/help/optim/ug/fmincon.html [Accessed July 24, 2025]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.