Paper:
Remote Support and Education System for Trauma Treatment at Disaster Sites
Daichi Aoki*, Soichi Murakami**
 , Chisaho Miura*, Satoshi Kanai*
, Takashige Abe***, Taku Senoo*
, Toshiaki Shichinohe**
, and Atsushi Konno*
, Chisaho Miura*, Satoshi Kanai*
, Takashige Abe***, Taku Senoo*
, Toshiaki Shichinohe**
, and Atsushi Konno*
*Graduate School of Information Science and Technology, Hokkaido University
Kita 14, Nishi 9, Kita-ku, Sapporo, Hokkaido 060-0814, Japan
**Hokkaido University Hospital
Kita 14, Nishi 5, Kita-ku, Sapporo, Hokkaido 060-8648, Japan
***Faculty of Medicine, Hokkaido University
Kita 15, Nishi 7, Kita-ku, Sapporo, Hokkaido 060-8638, Japan

This study proposes a dual-purpose system for remote medical support during disasters and trauma treatment education, aiming to enhance procedural guidance and training effectiveness in resource-limited and high-risk environments. The system consists of a remote support system for trauma treatment and a medical education system for trauma training. The remote support system enables trauma experts at distant locations to interact with a 3D digital twin of disaster victims and their surroundings within a virtual reality environment, thereby providing procedural guidance to on-site medical personnel. The system uses widely available devices such as smartphones for 3D scanning and head-mounted displays for immersive visualization. This design enables rapid deployment at disaster sites without requiring specialized equipment or complex setup procedures. The trauma education system records expert surgical treatments using motion-capture technology and reconstructs them as interactive 3D avatars, allowing trainees to observe and learn techniques from multiple perspectives. The remote support system was evaluated through fingertip-based interaction tasks in a simulated disaster scenario, where the alignment accuracy was assessed using augmented reality overlays, resulting in a measured average error of 27.0 mm. Similarly, the trauma education system was evaluated for positional accuracy in instrument handling tasks. These results confirm the feasibility and practicality of the proposed system and demonstrate its potential to improve both emergency medical response and surgical education.
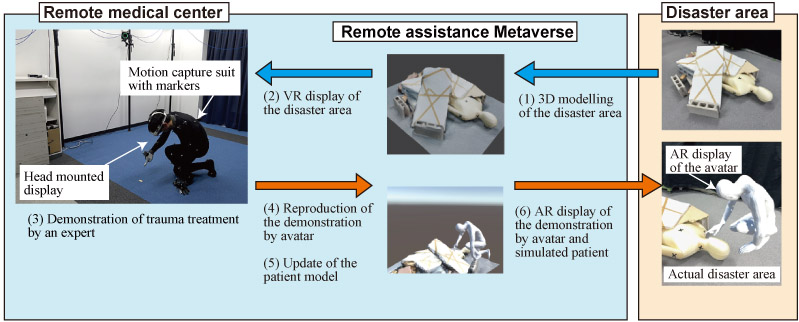
Overview of the remote support system
- [1] Y. Yanagawa, “Current status of and issues concerning medical relief for huge disasters,” Japanese J. of Neurosurgery, Vol.28, No.9, pp. 561-566, 2019 (in Japanese). https://doi.org/10.7887/jcns.28.561
- [2] C. Yasuda, “Precautions in providing medical treatments beyond physician’s own specialty during emergency medical relief activities and in medical care at evacuation shelters,” The Japanese J. of Quality and Safety in Healthcare, Vol.6, No.2, pp. 252-254, 2011 (in Japanese). https://doi.org/10.11397/jsqsh.6.252
- [3] D. B. Sonshine, A. Caldwell, R. A. Gosselin, C. T. Born, and R. R. Coughlin, “Critically assessing the haiti earthquake response and the barriers to quality orthopaedic care,” Clinical Orthopaedics and Related Research, Vol.470, No.10, pp. 2895-2904, 2012. https://doi.org/10.1007/s11999-012-2333-4
- [4] D. A. Sonshine, A. Caldwell, R. A. Gosselin, C. T. Born, and R. R. Coughlin, “Reply to letter to the editor: Critically assessing the haiti earthquake response and the barriers to quality orthopaedic care,” Clinical Orthopaedics and Related Research, Vol.471, No.2, pp. 692-693, 2013. https://doi.org/10.1007/s11999-012-2685-9
- [5] Z. Materna, M. Španěl, M. Mast, V. Beran, F. Weisshardt, M. Burmester, and P. Smrž, “Teleoperating assistive robots: A novel user interface relying on semi-autonomy and 3D environment mapping,” J. Robot. Mechatron., Vol.29, No.2, pp. 381-394, 2017. https://doi.org/10.20965/jrm.2017.p0381
- [6] J. C. Oliveira, X. Shen, and N. D. Georganas, “Collaborative virtual environment for industrial training and e-commerce,” Proc. of the ACM Symposium on Virtual Reality Software and Technology (VRST), 2000.
- [7] J. J. P. Franko, M. M. Vu, M. E. Parsons, V. Y. Sohn, and J. R. Bingham, “Surgical training for a disaster: Preparation of surgical trainees for victims of conflict,” Military Medicine, Vol.188, Nos.7-8, pp. e2502-e2508, 2023. https://doi.org/10.1093/milmed/usac365
- [8] T. Shichinohe and E. Kobayashi, “Cadaver surgical training in japan: Its past, present, and ideal future perspectives,” Surgery Today, Vol.52, pp. 354-358, 2022. https://doi.org/10.1007/s00595-021-02330-5
- [9] C. M. Harrington, D. O. Kavanagh, J. F. Quinlan, D. Ryan, P. Dicker, D. O’Keeffe, O. Traynor, and S. Tierney, “Development and evaluation of a trauma decision-making simulator in Oculus virtual reality,” The American J. of Surgery, Vol.215, No.1, pp. 42-47, 2018. https://doi.org/10.1016/j.amjsurg.2017.02.011
- [10] G. Huri, M. R. Gülşen, E. B. Karmış, and D. Karagüven, “Cadaver versus simulator based arthroscopic training in shoulder surgery,” Turkish J. of Medical Sciences, Vol.51, No.3, pp. 1179-1190, 2021. https://doi.org/10.3906/sag-2011-71
- [11] K. Ebina, T. Abe, L. Yan, K. Hotta, T. Shichinohe, M. Higuchi, N. Iwahara, Y. Hosaka, S. Harada, H. Kikuchi, H. Miyata, R. Matsumoto, T. Osawa, Y. Kurashima, M. Watanabe, M. Kon, S. Murai, S. Komizunai, T. Tsujita, K. Sase, X. Chen, T. Senoo, N. Shinohara, and A. Konno, “A surgical instrument motion measurement system for skill evaluation in practical laparoscopic surgery training,” PLOS ONE, Vol.19, No.6, Article No.e0305693, 2024. https://doi.org/10.1371/journal.pone.0305693
- [12] D. Gasques, J. G. Johnson, T. Sharkey, Y. Feng, R. Wang, Z. R. Xu, E. Zavala, Y. Zhang, W. Xie, X. Zhang, K. Davis, M. Yip, and N. Weibel, “Artemis: A collaborative mixed-reality system for immersive surgical telementoring,” Proc. of the 2021 CHI Conf. on Human Factors in Computing Systems (CHI’21), Article No.662, 2021. https://doi.org/10.1145/3411764.3445576
- [13] C. Askar and H. Sternberg, “Use of smartphone lidar technology for low-cost 3D building documentation with iPhone 13 pro: A comparative analysis of mobile scanning applications,” Geomatics, Vol.3, No.4, pp. 563-579, 2023. https://doi.org/10.3390/geomatics3040030
- [14] Y. Kako, A. Yoshimura, M. Koyama, N. Miyasato, F. Seki, Y. Nakajima, and F. Satoh, “A study on factors composing rescue-difficulty – An analysis using empirical data on rescue operations at collapsed wooden houses during the 2016 Kumamoto earthquakes –,” J. of Social Safety Science, Vol.36, pp. 65-73, 2020 (in Japanese). https://doi.org/https://doi.org/10.11314/jisss.36.65
- [15] Y. Endo, T. Maruyama, and M. Tada, “Dhaibaworks: A software platform for human-centered cyber-physical systems,” Int. J. Automation Technol., Vol.17, No.3, pp. 292-304, 2023. https://doi.org/10.20965/ijat.2023.p0292
- [16] M. Müller, B. Heidelberger, M. Hennix, and J. Ratcliff, “Position based dynamics,” J. of Visual Communication and Image Representation, Vol.18, No.2, pp. 109-118, 2007. https://doi.org/10.1016/j.jvcir.2007.01.005
- [17] H. Tojima, S. Murakami, S. Poudel, Y. Kurashima, T. Asano, T. Noji, K. Okada, Y. M. Ito, H. Kaneko, Y. Izawa, H. Homma, and S. Hirano, “Development of a simulator and training curriculum for liver trauma surgery training for general surgeons,” Global Surgical Education, Vol.3, Article No.36, 2024. https://doi.org/10.1007/s44186-024-00233-w
- [18] S. Shibuya, N. Shido, R. Shirai, K. Sase, K. Ebina, X. Chen, T. Tsujita, S. Komizunai, T. Senoo, and A. Konno, “Proposal of simulation-based surgical navigation and development of laparoscopic surgical simulator that reflects motion of surgical instruments in real-world,” Int. J. Automation Technol., Vol.17, No.3, pp. 262-276, 2023. https://doi.org/10.20965/ijat.2023.p0262
- [19] X. Chen, D. Sakai, H. Fukuoka, R. Shirai, K. Ebina, S. Shibuya, K. Sase, T. Tsujita, T. Abe, K. Oka, and A. Konno, “Basic experiments toward mixed reality dynamic navigation for laparoscopic surgery,” J. Robot. Mechatron., Vol.34, No.6, pp. 1253-1267, 2022. https://doi.org/10.20965/jrm.2022.p1253
- [20] J. A. Martin, G. Regehr, R. Reznick, H. MacRae, J. Murnaghan, C. Hutchison, and M. Brown, “Objective structured assessment of technical skill (osats) for surgical residents,” The British J. of Surgery, Vol.84, No.2, pp. 273-278, 1997. https://doi.org/10.1046/j.1365-2168.1997.02502.x
- [21] M. Hong, J. W. Rozenblit, and A. J. Hamilton, “Simulation-based surgical training systems in laparoscopic surgery: A current review,” Virtual Reality, Vol.25, pp. 491-510, 2021. https://doi.org/10.1007/s10055-020-00469-z
- [22] “JATEC course,” (in Japanese). https://www.jtcr-jatec.org/index_jatec.html [Accessed May 16, 2025]
- [23] “ASSET course.” https://jp.jssoc.or.jp/modules/info/index.php?content_id=27 [Accessed May 16, 2025]
- [24] “Polycam.” https://poly.cam/ [Accessed May 16, 2025]
- [25] “Unity.” https://unity.com/ [Accessed May 16, 2025]
- [26] “Meta Quest.” https://www.meta.com/jp/en/quest/ [Accessed May 16, 2025]
- [27] “OptiTrack.” https://www.optitrack.com/ [Accessed May 16, 2025]
- [28] “Metagloves Pro.” https://www.manus-meta.com/products/metagloves-pro [Accessed May 16, 2025]
- [29] “Blender.” https://www.blender.org/ [Accessed May 18, 2025]
- [30] “Immersal.” https://immersal.com/ [Accessed May 18, 2025]
- [31] “RealityCapture,” (in Japanese). https://www.capturingreality.com/ [Accessed May 18, 2025]
- [32] “Scaniverse,” (in Japanese). https://scaniverse.com/ [Accessed May 18, 2025]
- [33] “Obi Softbody.” https://assetstore.unity.com/packages/tools/physics/obi-softbody-130029 [Accessed May 18, 2025]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.