Paper:
Wearable Assistive Robot for Torso Support: Managing Contact Force Distribution with Wearers
Shinichi Masaoka
 , Yuki Funabora†
, and Shinji Doki
, Yuki Funabora†
, and Shinji Doki
Department of Information and Communication Engineering, Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan
†Corresponding author

Wearable assistive robots have been studied widely to reduce the physical burden of tasks such as lifting and caregiving. Most existing systems, however, control only the joint torque. Even though wearable robots transmit actuator forces through direct contact with the body, these systems do not focus on managing the contact force generated at the human–robot interface. Our previous study developed wearable assistive robots capable of measuring and controlling the contact-force distribution. We verified the feasibility of evaluating safety and control performance using a single-joint arm-mounted robot and a multi-joint whole-body robot. However, the influence of force distribution on assist performance was not been sufficiently examined for multi-joint robots under assist conditions. The current study aimed to experimentally verify the effectiveness of using contact-force distribution information in a torso-mounted multi-joint robot (through experiments involving seven participants). The results showed that whereas the actual motor torque tracked the commanded torque under conventional torque-based control, the contact-force distribution experienced by the wearer varied across participants. This finding indicates that for wearable robots with complex joint structures, assessments of wearing states and assist effectiveness require an evaluation of the contact-force distribution in addition to the torque.
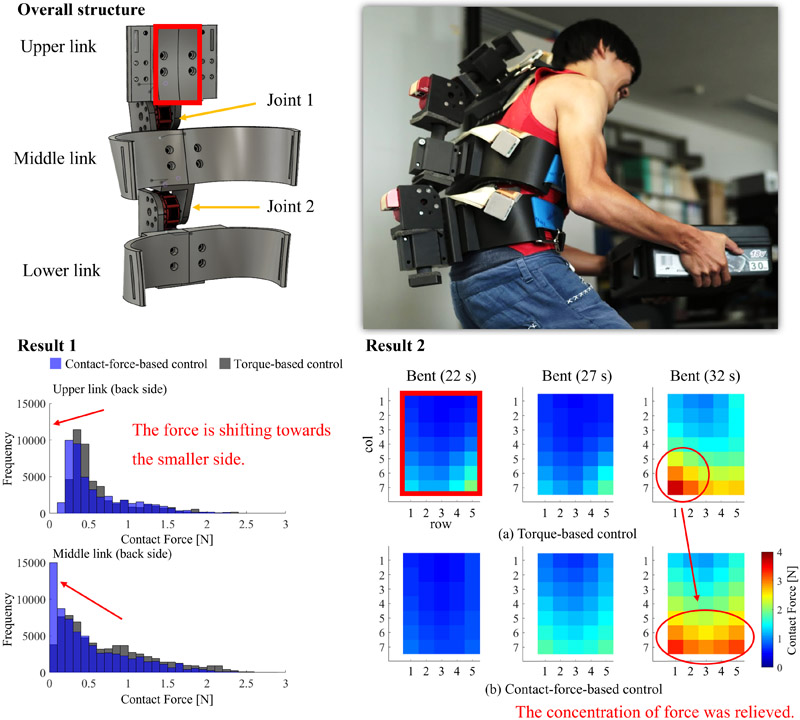
Overall structure and results
- [1] Ministry of Health, Labour and Welfare, “Estimates of supply and demand for long-term care personnel towards 2025 (finalized figures),” 2015 (in Japanese).
- [2] Ministry of Health, Labour and Welfare, “The 145th Subcommittee on Interim Long-Term Care Benefits of the Council on Social Security,” 2017 (in Japanese).
- [3] A. Uehara, H. Kawamoto, and Y. Sankai, “Proposal of period modulation control of wearable cyborg HAL trunk-unit for parkinson’s disease/parkinsonism utilizing motor intention and dynamics,” 2023 IEEE/SICE Int. Symposium on System Integration (SII), 2023. https://doi.org/10.1109/SII55687.2023.10039434
- [4] R. Sato, T. Hashimoto, K. Matsumoto, and H. Kobayashi, “Improvement of lower back support exoskeleton: Muscle suit “every”,” 2023 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), 2023. https://doi.org/10.1109/ROBIO58561.2023.10354763
- [5] S. Toxiri, A. S. Koopman, M. Lazzaroni, J. Ortiz, V. Power, M. P. De Looze, L. O’Sullivan, and D. G. Caldwell, “Rationale, implementation and evaluation of assistive strategies for an active back-support exoskeleton,” Frontiers in Robotics and AI, Vol.5, Article No.53, 2018. https://doi.org/10.3389/frobt.2018.00053
- [6] D. J. Hyun, H. Lim, S. Park, and S. Nam, “Singular wire-driven series elastic actuation with force control for a waist assistive exoskeleton, H-WEXv2,” IEEE/ASME Trans. on Mechatronics, Vol.25, No.2, pp. 1026-1035, 2020. https://doi.org/10.1109/TMECH.2020.2970448
- [7] T. Luger, M. Bär, R. Seibt, P. Rimmele, M. A. Rieger, and B. Steinhilber, “A passive back exoskeleton supporting symmetric and asymmetric lifting in stoop and squat posture reduces trunk and hip extensor muscle activity and adjusts body posture – A laboratory study,” Applied Ergonomics, Vol.97, Article No.103530, 2021. https://doi.org/10.1016/j.apergo.2021.103530
- [8] S. E. Chang, T. Pesek, T. R. Pote, J. Hull, J. Geissinger, A. A. Simon, M. M. Alemi, and A. T. Asbeck, “Design and preliminary evaluation of a flexible exoskeleton to assist with lifting,” Wearable Technologies, Vol.1, Article No.e10, 2020. https://doi.org/10.1017/wtc.2020.10
- [9] O. A. Chittar and S. B. Barve, “Waist-supportive exoskeleton: Systems and materials,” Materials Today: Proc., Vol.57, Part 2, pp. 840-845, 2022. https://doi.org/10.1016/j.matpr.2022.02.455
- [10] T. Luger, M. Bär, R. Seibt, M. A. Rieger, and B. Steinhilber, “Using a back exoskeleton during industrial and functional tasks—Effects on muscle activity, posture, performance, usability, and wearer discomfort in a laboratory trial,” Human Factors, Vol.65, No.1, pp. 5-21, 2023. https://doi.org/10.1177/00187208211007267
- [11] S. Bhardwaj, A. B. Shinde, R. Singh, and V. Vashista, “Manipulating device-to-body forces in passive exosuit: An experimental investigation on the effect of moment arm orientation using passive back-assist exosuit emulator,” Wearable Technologies, Vol.4, Article No.e17, 2023. https://doi.org/10.1017/wtc.2023.12
- [12] S. Nakamae, T. Tanaka, A. Murai, and T. Kusaka, “Torsion as a mechanism for enhancing torso mobility by increasing instantaneous torque transfer ratio,” J. Robot. Mechatron., Vol.37, No.1, pp. 222-230, 2025. https://doi.org/10.20965/jrm.2025.p0222
- [13] P. J. Bazira, “Clinically applied anatomy of the vertebral column,” Surgery (Oxford), Vol.39, No.6, pp. 315-323, 2021. https://doi.org/10.1016/j.mpsur.2021.04.004
- [14] N. Uchiyama, Y. Funabora, S. Doki, and K. Doki, “Control system based on pressure distribution for wearable assist robot on multi-joint body part,” 2016 14th Int. Conf. on Control, Automation, Robotics and Vision (ICARCV), 2016. https://doi.org/10.1109/ICARCV.2016.7838706
- [15] S. Masaoka, Y. Funabora, and S. Doki, “Arm-mounted assistive robot for measuring contact force and evaluating wearer safety,” IEEE Access, Vol.11, pp. 114855-114863, 2023. https://doi.org/10.1109/ACCESS.2023.3324417
- [16] S. Honda, Y. Funabora, S. Doki, and K. Doki, “Markerless measurement system of body surface deformation for structure determination of wearable robot,” 2019 IEEE/SICE Int. Symposium on System Integration (SII), pp. 135-140, 2019. https://doi.org/10.1109/SII.2019.8700351
- [17] S. Masaoka, Y. Funabora, and S. Doki, “Gravity compensation method for whole body-mounted robot with contact force distribution sensor,” IEEE Robotics and Automation Letters, Vol.9, No.9, pp. 7843-7850, 2024. https://doi.org/10.1109/LRA.2024.3433308
- [18] I. Hosoi, T. Matsumoto, S. H. Chang, Q. An, I. Sakuma, and E. Kobayashi, “Development of intraoperative plantar pressure measurement system considering weight bearing axis and center of pressure,” J. Robot. Mechatron., Vol.34, No.6, pp. 1318-1328, 2022. https://doi.org/10.20965/jrm.2022.p1318
- [19] J. Gwak, M. Shino, and A. Hirao, “Early detection of driver drowsiness utilizing machine learning based on physiological signals, behavioral measures, and driving performance,” 2018 21st Int. Conf. on Intelligent Transportation Systems (ITSC), pp. 1794-1800, 2018. https://doi.org/10.1109/ITSC.2018.8569493
- [20] K. Kong, J. Bae, and M. Tomizuka, “Control of rotary series elastic actuator for ideal force-mode actuation in human–robot interaction applications,” IEEE/ASME Trans. on Mechatronics, Vol.14, No.1, pp. 105-118, 2009. https://doi.org/10.1109/TMECH.2008.2004561
- [21] Y. Funabora, S. Doki, and K. Doki, “Contact force distribution predictive control system in wearable robot with tactile sensor,” Trans. of the Society of Instrument and Control Engineers, Vol.58, No.4, pp. 221-228, 2022 (in Japanese). https://doi.org/10.9746/sicetr.58.221
- [22] T. Saito and H. Ikeda, “Measurement of human pain tolerance to mechanical stimulus of human-collaborative robots,” Specific Research Reports of the National Institute of Industrial Safety, Vol.33, pp. 15-23, 2005 (in Japanese).
- [23] Markforged, Inc., “Composites Material Datasheet,” 2023. https://static.markforged.com/downloads/composites-data-sheet.pdf [Accessed May 30, 2026]
- [24] HEBI Robotics, “X-Series Actuator,” 2021. https://docs.hebi.us/resources/datasheets/X-SeriesDatasheet.pdf [Accessed May 30, 2026]
- [25] Tokai Rubber Industries, Ltd., “TRI releases wireless version of ‘SR Soft Vision,’” 2014. https://www.sumitomoriko.co.jp/pressrelease/2013/n51910098.pdf [Accessed May 30, 2026]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.