Paper:
Object Surface Identification Using Finger Vibration Information and Machine Learning in High-Precision Tracing Motion
Ryuichi Hodoshima
 , Tomohiro Uchida, Manabu Kasahara, Shinya Kotosaka, and Yoshihiro Tanaka
, Tomohiro Uchida, Manabu Kasahara, Shinya Kotosaka, and Yoshihiro Tanaka
Department of Science and Mechanical Engineering, Saitama University
255 Shimo-Okubo, Sakura-ku, Saitama, Saitama 338-8570, Japan

This study proposes an object identification method that combines high-precision tracing motion by an industrial robot with vibration information obtained from a polyvinylidene fluoride (PVDF) film sensor mounted on the finger surface. In conventional tactile sensing technology, methods that place sensors on the contact surface face challenges such as reduced durability due to wear and limited design freedom for the finger surface. The proposed method overcomes these issues by exploiting vibration propagation to physically isolate the sensor from the contact point. In this paper, we first investigate how tracing speed and pressing depth affect the vibration spectrum based on the mechanism of vibration generation. We then verify, through fundamental experiments using sandpaper, how finger material influences vibration transmission characteristics. The results demonstrate that a lightweight resin finger is advantageous for acquiring high-frequency vibrations and that strict control of tracing speed is essential for ensuring identification accuracy. Based on these findings, we conducted identification experiments using wide-band vibration information from 0 Hz to 8,000 Hz as features. The experiments targeted 33 types of diverse objects selected from real-world environments according to onomatopoeic classification. Evaluation with a support vector machine achieved an extremely high identification rate exceeding 99% for both finely textured sandpaper and real-world objects under high-precision robot control. Furthermore, high identification rates were maintained even when the tracing position and pressing depth were varied randomly, demonstrating the effectiveness and robustness of the proposed method.
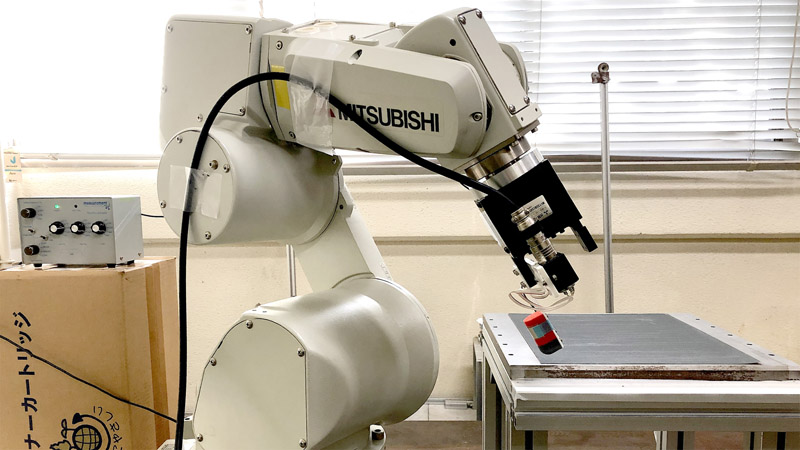
Robot-based surface identification
- [1] S. Hido, “Artificial Intelligence Technology for Industrial Robot Applications,” J. of the Robotics Society of Japan, Vol.35, No.3, pp. 186-190, 2017 (in Japanese). https://doi.org/10.7210/jrsj.35.186
- [2] Q. Li, O. Kroemer, Z. Su, F. F. Veiga, M. Kaboli, and H. J. Ritter, “A Review of Tactile Information: Perception and Action Through Touch,” IEEE Trans. on Robotics, Vol.36, No.6, pp. 1619-1634, 2020. https://doi.org/10.1109/TRO.2020.3003230
- [3] J. J. Gibson, “The Senses Considered as Perceptual Systems,” Houghton Mifflin, 1966.
- [4] S. J. Lederman and R. L. Klatzky, “Hand movements: A window into haptic object recognition,” Cognitive Psychology, Vol.19, No.3, pp. 342-368, 1987. https://doi.org/10.1016/0010-0285(87)90008-9
- [5] M. Hollins and S. R. Risner, “Evidence for the duplex theory of tactile texture perception,” Perception & Psychophysics, Vol.62, No.4, pp. 695-705, 2000. https://doi.org/10.3758/BF03206916
- [6] S. J. Bensmaïa and M. Hollins, “The vibrations of texture,” Somatosensory & Motor Research, Vol.20, No.1, pp. 33-43, 2003. https://doi.org/10.1080/0899022031000083825
- [7] H. Lee, K. Park, Y. Kim, and J. Kim, “Durable and repairable soft tactile skin for physical human robot interaction,” Proc. of the 2017 ACM/IEEE Int. Conf. on Human-Robot Interaction, pp. 183-184, 2017. https://doi.org/10.1145/3029798.3038417
- [8] Z. Kappassov, J.-A. Corrales, and V. Perdezuela, “Tactile sensing in dexterous robot hands – Review,” Robotics and Autonomous Systems, Vol.74, Part A, pp. 195-220, 2015. https://doi.org/10.1016/j.robot.2015.07.015
- [9] A. Khasnobish, G. Singh, A. Jati, A. Konar, and D. N. Tibarewala, “Object-shape recognition and 3D reconstruction from tactile sensor images,” Medical & Biological Engineering & Computing, Vol.52, No.4, pp. 353-362, 2014. https://doi.org/10.1007/s11517-014-1142-1
- [10] W. Yuan, S. Dong, and E. H. Adelson, “GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force,” Sensors, Vol.17, No.12, Article No.2762, 2017. https://doi.org/10.3390/s17122762
- [11] N. Jamali and C. Sammut, “Material classification by tactile sensing using surface textures,” 2010 IEEE Int. Conf. on Robotics and Automation, pp. 2336-2341, 2010. https://doi.org/10.1109/ROBOT.2010.5509675
- [12] J. A. Fishel and G. E. Loeb, “Bayesian exploration for intelligent identification of textures,” Frontiers in Neurorobotics, Vol.6, Article No.4, 2012. https://doi.org/10.3389/fnbot.2012.00004
- [13] Y. Xin, H. Tian, C. Guo, X. Li, H. Sun, P. Wang, J. Lin, S. Wang, and C. Wang, “PVDF tactile sensors for detecting contact force and slip: A review,” Ferroelectrics, Vol.504, No.1, pp. 31-45, 2016. https://doi.org/10.1080/00150193.2016.1238723
- [14] J. Dargahi and S. Najarian, “A supported membrane type sensor for medical tactile mapping,” Sensor Review, Vol.24, No.3, pp. 284-297, 2004. https://doi.org/10.1108/02602280410545416
- [15] R. Kikuuwe, K. Nakamura, and M. Yamamoto, “Finger-Mounted Tactile Sensor for Evaluating Surfaces,” J. Robot. Mechatron., Vol.24, No.3, pp. 430-440, 2012. https://doi.org/10.20965/jrm.2012.p0430
- [16] H. Hu, Y. Han, A. Song, S. Chen, C. Wang, and Z. Wang, “A Finger-Shaped Tactile Sensor for Fabric Surfaces Evaluation by 2-Dimensional Active Sliding Touch,” Sensors, Vol.14, No.3, pp. 4899-4913, 2014. https://doi.org/10.3390/s140304899
- [17] P. Yu, W. Liu, C. Gu, X. Cheng, and X. Fu, “Flexible Piezoelectric Tactile Sensor Array for Dynamic Three-Axis Force Measurement,” Sensors, Vol.16, No.6, Article No.819, 2016. https://doi.org/10.3390/s16060819
- [18] S. Luo, J. Bimbo, R. Dahiya, and H. Liu, “Robotic tactile perception of object properties: A review,” Mechatronics, Vol.48, pp. 54-67, 2017. https://doi.org/10.1016/j.mechatronics.2017.11.002
- [19] J. M. Romano and K. J. Kuchenbecker, “Creating realistic virtual textures from contact acceleration data,” IEEE Trans. on Haptics, Vol.5, No.2, pp. 109-119, 2012. https://doi.org/10.1109/TOH.2011.38
- [20] J. Sinapov, V. Sukhoy, R. Sahai, and A. Stoytchev, “Vibrotactile recognition and categorization of surfaces by a humanoid robot,” IEEE Trans. on Robotics, Vol.27, No.3, pp. 488-497, 2011. https://doi.org/10.1109/TRO.2011.2127130
- [21] Y. Tanaka, D. P. Nguyen, T. Fukuda, and A. Sano, “Wearable skin vibration sensor using a PVDF film,” 2015 IEEE World Haptics Conf. (WHC), pp. 146-151, 2015. https://doi.org/10.1109/WHC.2015.7177705
- [22] C. Cortes and V. Vapnik, “Support-vector networks,” Machine Learning, Vol.20, pp. 273-297, 1995. https://doi.org/10.1007/BF00994018
- [23] C. J. C. Burges, “A Tutorial on Support Vector Machines for Pattern Recognition,” Data Mining and Knowledge Discovery, Vol.2, pp. 121-167, 1998. https://doi.org/10.1023/A:1009715923555
- [24] F. Pedregosa et al., “Scikit-learn: Machine Learning in Python,” J. of Machine Learning Research, Vol.12, No.85, pp. 2825-2830, 2011.
- [25] J. Scheibert, S. Leurent, A. Prevost, and G. Debrégeas, “The role of fingerprints in the coding of tactile information probed with a biomimetic sensor,” Science, Vol.323, No.5920, pp. 1503-1506, 2009. https://doi.org/10.1126/science.1166467
- [26] T. Hayakawa, S. Matsui, and J. Watanabe, “Classification method of tactile textures using onomatopoeias,” Trans. of the Virtual Reality Society of Japan, Vol.15, No.3, pp. 487-490, 2010 (in Japanese). https://doi.org/10.18974/tvrsj.15.3_487
- [27] K. O. Johnson and J. R. Phillips, “Tactile spatial resolution. I. Two-point discrimination, gap detection, grating resolution, and letter recognition,” J. of Neurophysiology, Vol.46, No.6, pp. 1177-1192, 1981. https://doi.org/10.1152/jn.1981.46.6.1177
- [28] M. Kaboli, K. Yao, D. Feng, and G. Cheng, “Tactile-based active object discrimination and target object search in an unknown workspace,” Autonomous Robots, Vol.43, pp. 123-152, 2019. https://doi.org/10.1007/s10514-018-9707-8
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.