Paper:
Funabot-Grab: Tactile Internet Device Capable of Transmitting Human-to-Human Contact Locations
Shinichi Masaoka
 , Yuki Funabora†
, and Shinji Doki
, Yuki Funabora†
, and Shinji Doki
Department of Information and Communication Engineering, Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan
†Corresponding author

With the development of the internet and the availability of sufficient bandwidth, the performance of haptic devices is considered important because device specifications directly determine the comfort of wearing and the tactile sensations that can be transmitted. The Funabot-Grab is a haptic device that evokes a grabbed tactile sensation. Funabot-Grab can exert a tightening force by controlling the air pressure applied to the artificial muscles. There are seven artificial muscles on the fabric, and the tightening force of each artificial muscle is controlled independently. In a previous study, we used a model arm to incorporate Funabot-Grab into a tactile transmission system with the aim of using it as a tactile internet device. We conducted a preliminary experiment with three subjects as a precursor to the full-scale experiment. It was found that it is possible to transmit the static contact force and its position, even to the subjects. However, it became clear that further improvements to the device are needed for it to be worn optimally on every human body, considering the large degree of individual variation, and to evoke a smoother, continuous tactile sensation.
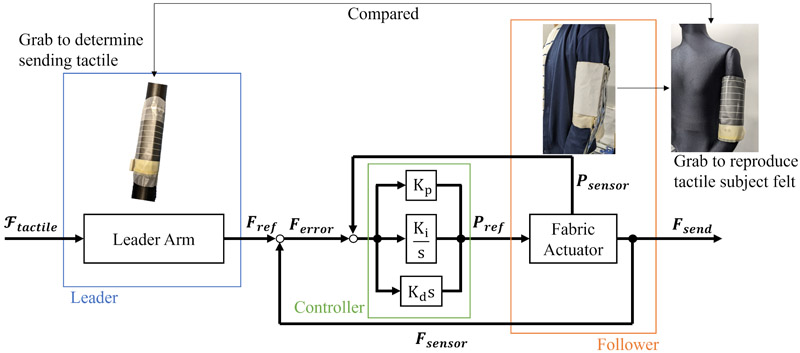
System architecture for tactile internet
- [1] N. Promwongsa et al., “A comprehensive survey of the tactile internet: State-of-the-art and research directions,” IEEE Communications Surveys & Tutorials, Vol.23, No.1, pp. 472-523, 2021. https://doi.org/10.1109/COMST.2020.3025995
- [2] S. K. Sharma, I. Woungang, A. Anpalagan, and S. Chatzinotas, “Toward tactile internet in beyond 5G era: Recent advances, current issues, and future directions,” IEEE Access, Vol.8, pp. 56948-56991, 2020. https://doi.org/10.1109/ACCESS.2020.2980369
- [3] C. Pacchierotti et al., “Wearable haptic systems for the fingertip and the hand: Taxonomy, review, and perspectives,” IEEE Trans. on Haptics, Vol.10, No.4, pp. 580-600, 2017. https://doi.org/10.1109/TOH.2017.2689006
- [4] D.-Y. Huang et al., “RetroShape: Leveraging rear-surface shape displays for 2.5D interaction on smartwatches,” Proc. of the 30th Annual ACM Symp. on User Interface Software and Technology, pp. 539-551, 2017. https://doi.org/10.1145/3126594.3126610
- [5] D. Prattichizzo, F. Chinello, C. Pacchierotti, and M. Malvezzi, “Towards wearability in fingertip haptics: A 3-DoF wearable device for cutaneous force feedback,” IEEE Trans. on Haptics, Vol.6, No.4, pp. 506-516, 2013. https://doi.org/10.1109/TOH.2013.53
- [6] M. Sarac et al., “Perceived intensities of normal and shear skin stimuli using a wearable haptic bracelet,” IEEE Robotics and Automation Letters, Vol.7, No.3, pp. 6099-6106, 2022. https://doi.org/10.1109/LRA.2021.3140132
- [7] L. Kuang et al., “A wearable haptic device for the hand with interchangeable end-effectors,” IEEE Trans. on Haptics, Vol.17, No.2, pp. 129-139, 2024. https://doi.org/10.1109/TOH.2023.3284980
- [8] D. A. Torres, B. Lemaire-Semail, C. Giraud-Audine, F. Giraud, and M. Amberg, “Design and control of an ultrasonic surface haptic device for longitudinal and transverse mode comparison,” Sensors and Actuators A: Physical, Vol.331, Article No.113019, 2021. https://doi.org/10.1016/j.sna.2021.113019
- [9] E. Pezent et al., “Tasbi: Multisensory squeeze and vibrotactile wrist haptics for augmented and virtual reality,” 2019 IEEE World Haptics Conf., 2019. https://doi.org/10.1109/WHC.2019.8816098
- [10] S. Cai et al., “ViboPneumo: A vibratory-pneumatic finger-worn haptic device for altering perceived texture roughness in mixed reality,” IEEE Trans. on Visualization and Computer Graphics, Vol.31, No.7, pp. 3957-3972, 2025. https://doi.org/10.1109/TVCG.2024.3391877
- [11] T. Han, F. Anderson, P. Irani, and T. Grossman, “HydroRing: Supporting mixed reality haptics using liquid flow,” Proc. of the 31st Annual ACM Symp. on User Interface Software and Technology, pp. 913-925, 2018. https://doi.org/10.1145/3242587.3242667
- [12] J.-B. Chossat, D. K. Y. Chen, Y.-L. Park, and P. B. Shull, “Soft wearable skin-stretch device for haptic feedback using twisted and coiled polymer actuators,” IEEE Trans. on Haptics, Vol.12, No.4, pp. 521-532, 2019. https://doi.org/10.1109/TOH.2019.2943154
- [13] C. M. Nunez et al., “A large-area wearable soft haptic device using stacked pneumatic pouch actuation,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 591-598, 2022. https://doi.org/10.1109/IROS47612.2022.9981919
- [14] P. Polygerinos, Z. Wang, K. C. Galloway, R. J. Wood, and C. J. Walsh, “Soft robotic glove for combined assistance and at-home rehabilitation,” Robotics and Autonomous Systems, Vol.73, pp. 135-143, 2015. https://doi.org/10.1016/j.robot.2014.08.014
- [15] A. Gupta, A. A. R. Irudayaraj, and R. Balakrishnan, “HapticClench: Investigating squeeze sensations using memory alloys,” Proc. of the 30th Annual ACM Symp. on User Interface Software and Technology, pp. 109-117, 2017. https://doi.org/10.1145/3126594.3126598
- [16] N. Takahashi, H. Takahashi, and H. Koike, “Soft exoskeleton glove enabling force feedback for human-like finger posture control with 20 degrees of freedom,” 2019 IEEE World Haptics Conf., pp. 217-222, 2019. https://doi.org/10.1109/WHC.2019.8816142
- [17] A. Delazio et al., “Force jacket: Pneumatically-actuated jacket for embodied haptic experiences,” Proc. of the 2018 CHI Conf. on Human Factors in Computing Systems, Article No.320, 2018. https://doi.org/10.1145/3173574.3173894
- [18] M. Zhu et al., ‘PneuSleeve: In-fabric multimodal actuation and sensing in a soft, compact, and expressive haptic sleeve,’’ Proc. of the 2020 CHI Conf. on Human Factors in Computing Systems, 2020. https://doi.org/10.1145/3313831.3376333
- [19] Y. Yamazaki, H. Mitake, and S. Hasegawa, “Implementation of tension-based compact necklace-type haptic device achieving widespread transmission of low-frequency vibrations,” IEEE Trans. on Haptics, Vol.15, No.3, pp. 535-546, 2022. https://doi.org/10.1109/TOH.2022.3176673
- [20] A. Gerald et al., “A soft robotic haptic feedback glove for colonoscopy procedures,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 583-590, 2022. https://doi.org/10.1109/IROS47612.2022.9981652
- [21] Y. Funabora, “Flexible fabric actuator realizing 3D movements like human body surface for wearable devices,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 6992-6997, 2018. https://doi.org/10.1109/IROS.2018.8594359
- [22] Y. Funabora, “Prototype of a fabric actuator with multiple thin artificial muscles for wearable assistive devices,” 2017 IEEE/SICE Int. Symp. on System Integration, pp. 356-361, 2017. https://doi.org/10.1109/SII.2017.8279238
- [23] Y. Peng et al., “Funabot-Suit: A bio-inspired and McKibben muscle-actuated suit for natural kinesthetic perception,” Biomimetic Intelligence and Robotics, Vol.3, No.4, Article No.100127, 2023. https://doi.org/10.1016/j.birob.2023.100127
- [24] S. Masaoka, Y. Funabora, and S. Doki, “Funabot-Grab: Tactile internet for grabbed tactile with fabric actuator and force distribution sensor,” 50th Annual Conf. of the IEEE Industrial Electronics Society, 2024. https://doi.org/10.1109/IECON55916.2024.10905993
- [25] J.-P. Koo et al., “Two-point discrimination of the upper extremities of healthy Koreans in their 20’s,” J. of Physical Therapy Science, Vol.28, No.3, pp. 870-874, 2016. https://doi.org/10.1589/jpts.28.870
- [26] J. Sone, Y. Matsumoto, Y. Yasuda, S. Hasegawa, and K. Yamada, “Development of MEMS tactile sensation device for haptic robot,” J. Robot. Mechatron., Vol.32, No.2, pp. 315-322, 2020. https://doi.org/10.20965/jrm.2020.p0315
- [27] K. Watatani, K. Terao, F. Shimokawa, and H. Takao, “A MEMS tactile sensor with fingerprint-like array of contactors for high resolution visualization of surface distribution of tactile information,” J. Robot. Mechatron., Vol.32, No.2, pp. 305-314, 2020. https://doi.org/10.20965/jrm.2020.p0305
- [28] “TRI releases wireless version of ‘SR Soft Vision,’” Tokai Rubber Industries, Ltd., 2014. https://www.sumitomoriko.co.jp/pressrelease/2013/n51910098.pdf [Accessed May 30, 2026]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.