Paper:
Virtual-Dynamics-Based Motion Planning for Industrial Manipulators via Integrating Information from Multiple High-Speed Sensors
Misato Koreki, Usukhbayar Chuluunbat, Hikaru Arita
 , Kazuto Nakashima
, and Kenji Tahara
, Kazuto Nakashima
, and Kenji Tahara
Kyushu University
744 Motooka, Nishi-ku, Fukuoka, Fukuoka 819-0395, Japan

High-speed sensors, such as high-speed cameras and optical proximity sensors, enable the detailed temporal measurements of physical phenomena that exceed the dynamic capabilities of conventional industrial robots. However, effectively leveraging this sensor information for robot motion planning remains challenging because of the temporal-scale gap between sensors and robots. This paper proposes a motion planning method that extracts the task-relevant meta-information of target phenomena from high-speed sensor data and generates feasible trajectories by considering robot constraints. The information extraction process identifies task-relevant characteristics from high-speed sensor data. To integrate heterogeneous sensor information and enable trajectory adaptation, we employed multiple virtual-dynamics-based control (MVDC), which can asynchronously integrate heterogeneous sensors with different measurement principles. To validate the proposed method, we conducted a case study in which a conventional industrial manipulator grasped a pendulum at its equilibrium point, the most challenging position. The system integrated global measurements from a 1 kHz high-speed camera with local measurements from proximity sensors using MVDC to predict the pendulum period and optimal grasping timing. Experimental results demonstrated that the proposed method enables successful grasping by bridging the temporal-scale gap between high-speed sensors and conventional robots through information integration.
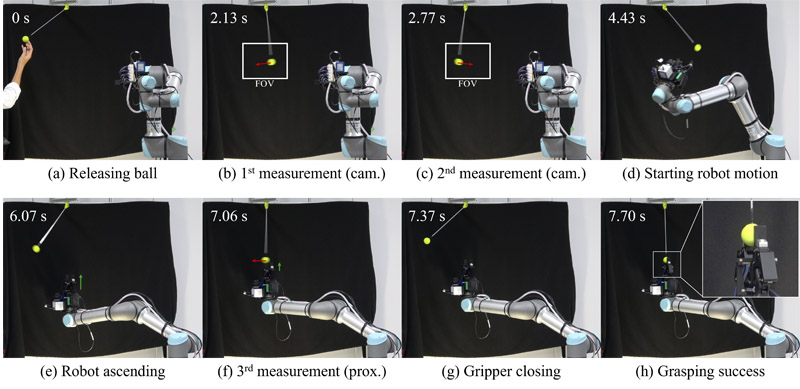
Grasping pendulum at equilibrium point
- [1] H. Hasegawa, Y. Suzuki, A. Ming, K. Koyama, M. Ishikawa, and M. Shimojo, “Net-Structure Proximity Sensor: High-speed and free-form sensor with analog computing circuit,” IEEE/ASME Trans. Mechatron., Vol.20, No.6, pp. 3232-3241, 2015. https://doi.org/10.1109/TMECH.2015.2417555
- [2] H. Arita, “A fast optical proximity sensor skin that contains an analog computing circuit and can cover an entire link,” Adv. Robot., Vol.37, No.17, pp. 1083-1099, 2023. https://doi.org/10.1080/01691864.2023.2239320
- [3] K. Yamato, H. Chiba, and H. Oku, “High speed three dimensional tracking of swimming cell by synchronous modulation between TeCE camera and tag lens,” IEEE Robot. Autom. Lett., Vol.5, No.2, pp. 1907-1914, 2020. https://doi.org/10.1109/LRA.2020.2969911
- [4] M. Jiang, K. Shimasaki, S. Hu, T. Senoo, and I. Ishii, “A 500-fps pan-tilt tracking system with deep-learning-based object detection,” IEEE Robot. Autom. Lett., Vol.6, No.2, pp. 691-698, 2021. https://doi.org/10.1109/LRA.2020.3048653
- [5] Y. Guo, W. D. Compton, and S. Chandrasekar, “In situ analysis of flow dynamics and deformation fields in cutting and sliding of metals,” Proc. Roy. Soc. A, Vol.471, No.2178, Article No.20150194, 2015. https://doi.org/10.1098/rspa.2015.0194
- [6] K. Bobzin, M. Öte, M. A. Knoch, I. Alkhasli, and H. Heinemann, “High-speed video analysis of the process stability in plasma spraying,” J. Therm. Spray Technol., Vol.30, pp. 987-1000, 2021. https://doi.org/10.1007/s11666-021-01159-1
- [7] T. Senoo, A. Namiki, and M. Ishikawa, “High-speed batting using a multi-jointed manipulator,” Proc. IEEE Int. Conf. Robot. Autom. (ICRA), pp. 1191-1196, 2004. https://doi.org/10.1109/ROBOT.2004.1307986
- [8] S. Morikawa, T. Senoo, A. Namiki, and M. Ishikawa, “Realtime collision avoidance using a robot manipulator with light-weight small high-speed vision systems,” Proc. IEEE Int. Conf. Robot. Autom. (ICRA), pp. 794-799, 2007. https://doi.org/10.1109/ROBOT.2007.363083
- [9] K. Ito, T. Sueishi, Y. Yamakawa, and M. Ishikawa, “Tracking and recognition of a human hand in dynamic motion for janken (rock-paper-scissors) robot,” Proc. IEEE Int. Conf. Autom. Sci. Eng. (CASE), pp. 891-896, 2016. https://doi.org/10.1109/COASE.2016.7743496
- [10] M. Ishikawa, “High-Speed Vision and its Applications Toward High-Speed Intelligent Systems,” J. Robot. Mechatron., Vol.34, No.5, pp. 912-935, 2022. https://doi.org/10.20965/jrm.2022.p0912
- [11] H. Chen, T. Kiyokawa, W. Wan, and K. Harada, “Adaptive Grasping of Moving Objects in Dense Clutter via Global-to-Local Detection and Static-to-Dynamic Planning,” Proc. IEEE Int. Conf. Robot. Autom. (ICRA), pp. 14059-14065, 2025. https://doi.org/10.1109/ICRA55743.2025.11127936
- [12] M. Koreki, U. Chuluunbat, H. Arita, K. Nakashima, and K. Tahara, “Motion Planning Leveraging High-Speed Sensors for Conventional Industrial Manipulator,” Proc. IEEE/SICE Int. Symp. Syst. Integr. (SII), pp. 1483-1489, 2026. https://doi.org/10.1109/SII64115.2026.11404605
- [13] H. Arita, H. Nakamura, T. Fujiki, and K. Tahara, “Smoothly Connected Preemptive Impact Reduction and Contact Impedance Control,” IEEE Trans. Robot., Vol.39, No.5, pp. 3536-3548, 2023. https://doi.org/10.1109/TRO.2023.3286045
- [14] T. Fujiki and K. Tahara, “Series admittance–impedance controller for more robust and stable extension of force control,” Robomech J., Vol.9, Article No.23, 2022. https://doi.org/10.1186/s40648-022-00237-5
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.