Paper:
Double-Roller Tactile Image Sensor for Simultaneous Double-Sided Inspection
Tomomi Murata and Kazuhiro Shimonomura
Department of Robotics, Ritsumeikan University
1-1-1 Nojihigashi, Kusatsu, Shiga 525-8577, Japan

This paper proposes a surface inspection method using a double-roller tactile image sensor. The roller-type tactile image sensor provides high spatial resolution by employing a camera and enables continuous contact with the object surface via the rollers. However, a single sensor can acquire a contact image from only one side of the object. To address this limitation, we developed a double-roller tactile image sensor capable of capturing contact images from both sides by sandwiching the object between two rollers. The relationship between applied force and image response was investigated through sensitivity experiments using a force gauge and nylon thread. Experiments using models simulating food and foreign objects revealed that a sufficiently large response was obtained with a pressing force of 0.1 N even for small objects with a diameter of 0.25 mm, while differences in material hardness and foreign object size resulted in differences in the contact image. Furthermore, we performed an experiment using shrimp as an example of food inspection and confirmed that the proposed sensor can successfully capture images of shell fragments remaining on the shrimp.
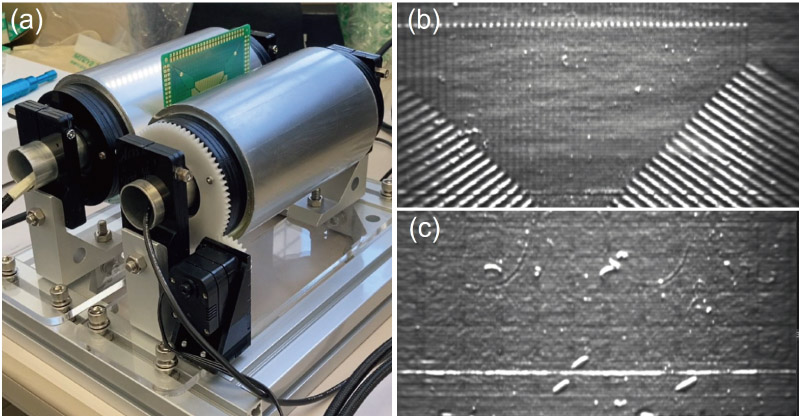
Double roller tactile image sensor (a) and output images (b, c)
- [1] T. Brosnan and D.-W. Sun, “Improving quality inspection of food products by computer vision–A review,” J. of Food Engineering, Vol.61, No.1, pp. 3-16, 2004. https://doi.org/10.1016/S0260-8774(03)00183-3
- [2] R. S. Dahiya, G. Metta, M. Valle, and G. Sandini, “Tactile sensing-from humans to humanoids,” IEEE Trans. on Robotics, Vol.26, No.1, pp. 1-20, 2010. https://doi.org/10.1109/TRO.2009.2033627
- [3] S. Luo, N. F. Lepora, W. Yuan, K. Althoefer, G. Cheng, and R. Dahiya, “Tactile robotics: An outlook,” IEEE Trans. on Robotics, 2025. https://doi.org/10.1109/TRO.2025.3608686
- [4] K. Sato, L. Canete, and T. Takahashi, “Development of a spray-coated tactile sensor – Prototype and modeling of 2D sensor on cylindrical surface –,” J. Robot. Mechatron., Vol.31, No.6, pp. 882-893, 2019. https://doi.org/10.20965/jrm.2019.p0882
- [5] K. Watatani, K. Terao, F. Shimokawa, and H. Takao, “A MEMS tactile sensor with fingerprint-like array of contactors for high resolution visualization of surface distribution of tactile information,” J. Robot. Mechatron., Vol.32, No.2, pp. 305-314, 2020. https://doi.org/10.20965/jrm.2020.p0305
- [6] Y. Tanaka, S. Shiraki, K. Katayama, K. Minamizawa, and D. Prattichizzo, “Bilaterally shared haptic perception for human-robot collaboration in grasping operation,” J. Robot. Mechatron., Vol.33, No.5, pp. 1104-1116, 2021. https://doi.org/10.20965/jrm.2021.p1104
- [7] H. Li, Y. Lin, C. Lu, M. Yang, E. Psomopoulou, and N. F. Lepora, “Classification of vision-based tactile sensors: A review,” IEEE Sensors J., Vol.25, No.19, pp. 35672-35686, 2025. https://doi.org/10.1109/JSEN.2025.3599236
- [8] S. Zhang et al., “Hardware technology of vision-based tactile sensor: A review,” IEEE Sensors J., Vol.22, No.22, pp. 21410-21427, 2022. https://doi.org/10.1109/JSEN.2022.3210210
- [9] S. Li et al., “When vision meets touch: A contemporary review for visuotactile sensors from the signal processing perspective,” IEEE J. of Selected Topics in Signal Processing, Vol.18, No.3, pp. 267-287, 2024. https://doi.org/10.1109/JSTSP.2024.3416841
- [10] K. Shimonomura and H. Nakashima, “A combined tactile and proximity sensing employing a compound-eye camera,” Proc. of IEEE SENSORS 2013, pp. 1464-1465, 2013. https://doi.org/10.1109/ICSENS.2013.6688497
- [11] K. Nozu and K. Shimonomura, “Robotic bolt insertion and tightening based on in-hand object localization and force sensing,” Proc. of 2018 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 310-315, 2018. https://doi.org/10.1109/AIM.2018.8452338
- [12] K. Shimonomura, “TacTile image sensors employing camera: A review,” Sensors, Vol.19, No.18, Article No.3933, 2019. https://doi.org/10.3390/s19183933
- [13] B. Ward-Cherrier, N. Pestell, L. Cramphorn, B. Winstone, M. Elena Giannaccini, J. Rossiter, and N. F. Lepora, “The TacTip family: Soft optical tactile sensors with 3D-printed biomimetic morphologies,” Soft Robotics, Vol.5, No.2, pp. 216-227, 2018. https://doi.org/10.1089/soro.2017.0052
- [14] C. Sferrazza and R. D’Andrea, “Sim-to-real for high-resolution optical tactile sensing: From images to three-dimensional contact force distributions,” Soft Robotics, Vol.9, No.5, pp. 926-937, 2022. https://doi.org/10.1089/soro.2020.0213
- [15] G. Zhang, Y. Du, H. Yu, and M. Y. Wang, “DelTact: A vision-based tactile sensor using a dense color pattern,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 10778-10785, 2022. https://doi.org/10.1109/LRA.2022.3196141
- [16] W. Yuan, S. Dong, and E. H. Adelson, “GelSight: High-resolution robot tactile sensors for estimating geometry and force,” Sensors, Vol.17, No.12, Article No.2762, 2017. https://doi.org/10.3390/s17122762
- [17] M. Lambeta et al., “DIGIT: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,” IEEE Robotics and Automation Letters, Vol.5, No.3, pp. 3838-3845, 2020. https://doi.org/10.1109/LRA.2020.2977257
- [18] K. Shimonomura, T. Chang, and T. Murata, “Detection of foreign bodies in soft foods employing tactile image sensor,” Frontiers in Robotics and AI, Vol.8, Article No.774080, 2021. https://doi.org/10.3389/frobt.2021.774080
- [19] G. Cao, J. Jiang, C. Lu, D. F. Gomes, and S. Luo, “Touchroller: A rolling optical tactile sensor for rapid assessment of textures for large surface areas,” Sensors, Vol.23, No.5, Article No.2661, 2023. https://doi.org/10.3390/s23052661
- [20] M. A. Mirzaee, H.-J. Huang, and W. Yuan, “GelBelt: A vision-based tactile sensor for continuous sensing of large surfaces,” IEEE Robotics and Automation Letters, Vol.10, No.2, pp. 2016-2023, 2025. https://doi.org/10.1109/LRA.2025.3527306
- [21] A. Yamaguchi and C. G. Atkeson, “Recent progress in tactile sensing and sensors for robotic manipulation: Can we turn tactile sensing into vision?,” Advanced Robotics, Vol.33, pp. 661-673, 2019. https://doi.org/10.1080/01691864.2019.1632222
- [22] H. Sun, K. J. Kuchenbecker, and G. Martius, “A soft thumb-sized vision-based sensor with accurate all-round force perception,” Nature Machine Intelligence, Vol.4, pp. 135-145, 2022. https://doi.org/10.1038/s42256-021-00439-3
- [23] S. Yuan et al., “Tactile-reactive roller grasper,” IEEE Trans. on Robotics, Vol.41, pp. 1938-1955, 2025. https://doi.org/10.1109/TRO.2025.3543324
- [24] W. K. Do, A. Kundan Dhawan, M. Kitzmann, and M. Kennedy, “DenseTact-Mini: An optical tactile sensor for grasping multi-scale objects from flat surfaces,” 2024 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 6928-6934, 2024. https://doi.org/10.1109/ICRA57147.2024.10610583
- [25] Q. K. Luu, D. Q. Nguyen, N. H. Nguyen, N. P. Dam, and V. A. Ho, “Vision-based proximity and tactile sensing for robot arms: Design, perception, and control,” IEEE Trans. on Robotics, Vol.41, pp. 5000-5019, 2025. https://doi.org/10.1109/TRO.2025.3593087
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.