Paper:
Mechanical Ghost Palpation (MGP): Application of Ghost Imaging for Tactile Sensing and Basic Validation
Koichiro Kanaya*1, Shunta Ide*1, Takahiro Asano*2, Kenichi Murakami*3
 , and Yuji Yamakawa*4
, and Yuji Yamakawa*4
*1School of Engineering, The University of Tokyo
4-6-1 Komaba, Meguro-ku, Tokyo 153-8505, Japan
*2Institute of Industrial Science, The University of Tokyo
4-6-1 Komaba, Meguro-ku, Tokyo 153-8505, Japan
*3Research Institute for Science and Technology, Tokyo University of Science
6-3-1 Niijuku, Katsushika-ku, Tokyo 125-8585, Japan
*4Interfaculty Initiative in Information Studies, The University of Tokyo
4-6-1 Komaba, Meguro-ku, Tokyo 153-8505, Japan

To achieve global palpation efficiently and without the use of tactile sensors, this study proposes mechanical ghost palpation (MGP), which applies the concept of ghost imaging (GI) to palpation, and verifies its basic principle. However, unlike general GI, which uses light as a medium, the configuration of the pressing patterns in MGP, which involves mechanical contact, presents system-specific challenges: from the correlation between the pattern structure and pressing depth, to the replacement and mass production of the patterns. To overcome these issues, in this work, we proposed a pattern configuration method that imposes constraints on the number of contact points and the centroid of their positions, and further proposed a technique to virtually increase pattern diversity by using a rotation operation on two square patterns. In the experiment, we estimated the stiffness map of a silicone gel phantom containing an embedded inclusion within a 5×5 grid by performing a total of 8 times pressing operations (using two pressing patterns). The results confirmed that the inclusion’s location was included within the top three highest-stiffness positions in the MGP-estimated stiffness map. This achievement demonstrates the potential of MGP to efficiently perform global palpation independent of tactile sensors.
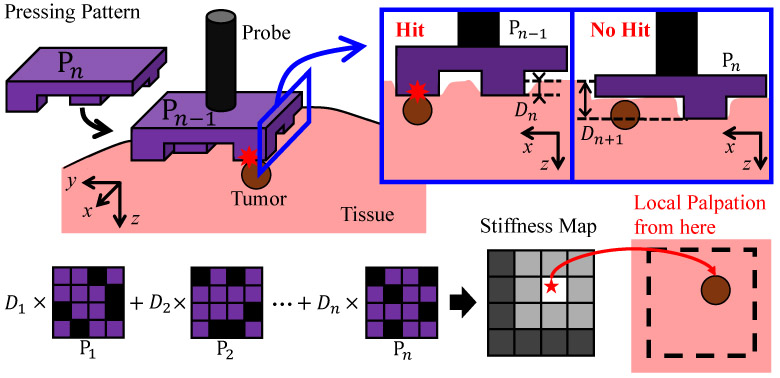
MGP: press patterns to locate tumor
- [1] J. Konstantinova, A. Jiang, K. Althoefer, P. Dasgupta, and T. Nanayakkara, “Implementation of Tactile Sensing for Palpation in Robot-Assisted Minimally Invasive Surgery: A Review,” IEEE Sensors J., Vol.14, Issue 8, pp. 2490-2501, 2014. https://doi.org/10.1109/JSEN.2014.2325794
- [2] N. Wang, G. J. Gerling, R. M. Childress, and M. L. Martin, “Quantifying Palpation Techniques in Relation to Performance in a Clinical Prostate Exam,” IEEE Trans. on Information Technology in Biomedicine, Vol.14, Issue 4, pp. 1088-1097, 2010. https://doi.org/10.1109/TITB.2010.2041064
- [3] K. J. Saunders, C. A. Pilgrim, and H. S. Pennypacker, “Increased proficiency of search in breast self-examination,” Cancer, Vol.58, Issue 11, pp. 2531-2537, 1986. https://doi.org/10.1002/1097-0142(19861201)58:11<2531::AID-CNCR2820581128>3.0.CO;2-J
- [4] W. Wang, J. Wang, Y. Luo, X. Wang, and H. Song, “A Survey on Force Sensing Techniques in Robot-Assisted Minimally Invasive Surgery,” IEEE Trans. on Haptics, Vol.16, Issue 4, pp. 702-718, 2023. https://doi.org/10.1109/TOH.2023.3329172
- [5] P. S. Zarrin, A. Escoto, R. Xu, R. V. Patel, M. D. Naish, and A. L. Trejos, “Development of a 2-DOF Sensorized Surgical Grasper for Grasping and Axial Force Measurements,” IEEE Sensors J., Vol.18, Issue 7, pp. 2816-2826, 2018. https://doi.org/10.1109/JSEN.2018.2805327
- [6] A. M. Okamura, “Haptic feedback in robot-assisted minimally invasive surgery,” Current Opinion in Urology, Vol.19, No.1, pp. 102-107, 2009. https://doi.org/10.1097/MOU.0b013e32831a478c
- [7] A. L. Trejos, A. Escoto, D. Hughes, M. D. Naish, and R. V. Patel, “A sterilizable force-sensing instrument for laparoscopic surgery,” 5th IEEE RAS/EMBS Int. Conf. on Biomedical Robotics and Biomechatronics, pp. 157-162, 2014. https://doi.org/10.1109/BIOROB.2014.6913769
- [8] Z. Chua, A. M. Jarc, and A. M. Okamura, “Toward Force Estimation in Robot-Assisted Surgery Using Deep Learning with Vision and Robot State,” 2021 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 12335-12341, 2021. https://doi.org/10.1109/ICRA48506.2021.9560945
- [9] X. Wang, G. K. Ananthasuresh, and J. P. Ostrowski, “Vision-based sensing of forces in elastic objects,” Sensors and Actuators A: Physical, Vol.94, Issue 3, pp. 142-156, 2001. https://doi.org/10.1016/S0924-4247(01)00705-1
- [10] R. Xue, Z. Du, Z. Yan, and B. Ren, “An estimation method of grasping force for laparoscope surgical robot based on the model of a cable-pulley system,” Mechanism and Machine Theory, Vol.134, pp. 440-454, 2019. https://doi.org/10.1016/j.mechmachtheory.2018.12.032
- [11] A. Saracino, A. Deguet, F. Staderini, M. N. Boushaki, F. Cianchi, A. Menciassi, and E. Sinibaldi, “Haptic feedback in the da Vinci Research Kit (dVRK): A user study based on grasping, palpation, and incision tasks,” The Int. J. of Medical Robotics and Computer Assisted Surgery, Vol.15, Issue 4, Article No.e1999, 2019. https://doi.org/10.1002/rcs.1999
- [12] K. Li, B. Pan, J. Zhan, W. Gao, Y. Fu, and S. Wang, “Design and performance evaluation of a 3-axis force sensor for MIS palpation,” Sensor Review, Vol.35, Issue 2, pp. 219-228, 2015. https://doi.org/10.1108/SR-04-2014-632
- [13] Z. Tang, S. Wang, M. Li, and C. Shi, “Development of a Distal Tri-Axial Force Sensor for Minimally Invasive Surgical Palpation,” IEEE Trans. on Medical Robotics and Bionics, Vol.4, Issue 1, pp. 145-155, 2022. https://doi.org/10.1109/TMRB.2022.3142361
- [14] Y. Yan and J. Pan, “Fast Localization and Segmentation of Tissue Abnormalities by Autonomous Robotic Palpation,” IEEE Robotics and Automation Letters, Vol.6, Issue 2, pp. 1707-1714, 2021. https://doi.org/10.1109/LRA.2021.3058870
- [15] K. A. Nichols and A. M. Okamura, “Methods to Segment Hard Inclusions in Soft Tissue During Autonomous Robotic Palpation,” IEEE Trans. on Robotics, Vol.31, Issue 2, pp. 344-354, 2015. https://doi.org/10.1109/TRO.2015.2402531
- [16] H. Liu, D. P. Noonan, B. J. Challacombe, P. Dasgupta, L. D. Seneviratne, and K. Althoefer, “Rolling Mechanical Imaging for Tissue Abnormality Localization During Minimally Invasive Surgery,” IEEE Trans. on Biomedical Engineering, Vol.57, Issue 2, pp. 404-414, 2010. https://doi.org/10.1109/TBME.2009.2032164
- [17] Y. Tian, H. Ge, X.-J. Zhang, X.-Y. Xu, M.-H. Lu, Y. Jing, and Y.-F. Chen, “Acoustic Ghost Imaging in the Time Domain,” Physical Review Applied, Vol.13, No.6, Article No.064044, 2020. https://doi.org/10.1103/PhysRevApplied.13.064044
- [18] E. Rotunno, S. Gargiulo, G. M. Vanacore, C. Mechel, A. H. Tavabi, R. E. Dunin-Borkowski, F. Carbone, I. Madan, S. Frabboni, T. Guner, E. Karimi, I. Kaminer, and V. Grillo, “One-Dimensional “Ghost Imaging” in Electron Microscopy of Inelastically Scattered Electrons,” ACS Photonics, Vol.10, Issue 6, pp. 1708-1715, 2023. https://doi.org/10.1021/acsphotonics.2c01925
- [19] J. H. Shapiro, “Computational ghost imaging,” Physical Review A: Atomic, Molecular, and Optical Physics, Vol.78, No.6, Article No.061802, 2008. https://doi.org/10.1103/PhysRevA.78.061802
- [20] Y. Bromberg, O. Katz, and Y. Silberberg, “Ghost imaging with a single detector,” Physical Review A: Atomic, Molecular, and Optical Physics, Vol.79, No.5, Article No.053840, 2009. https://doi.org/10.1103/PhysRevA.79.053840
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.