Paper:
Shape-Based Extrapolation of Contact Patterns to Support Tactile Regrasping
Kourosh Jolaei
 , Jean-Philippe Roberge
, and Vincent Duchaine
, Jean-Philippe Roberge
, and Vincent Duchaine
École de Technologie Suérieure (ÉTS)
1100 Rue Notre-Dame Ouest, Montreal, Quebec H 1, Canada

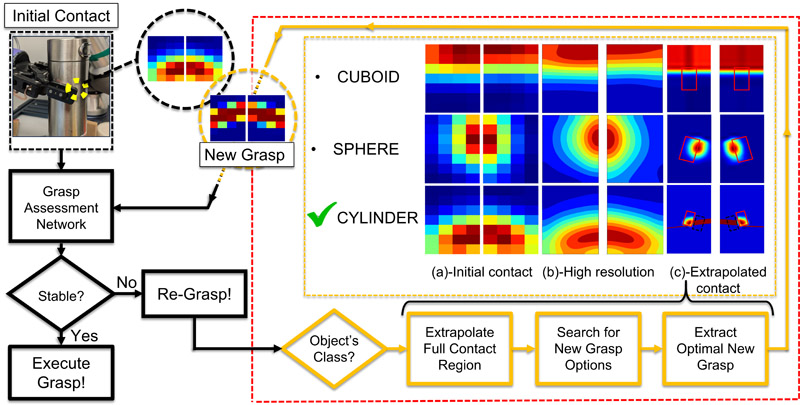
A method is proposed to support robotic regrasping by leveraging tactile data to extrapolate unseen contact regions. Initial tactile feedback from multimodal capacitive sensors mounted on robotic fingers was used to classify the object shape into prototypical categories. Based on this classification, shape-specific extrapolation strategies extend the tactile map beyond the initial contact area, providing a computationally efficient estimate of potential contact without requiring complex physical simulations. The extrapolated regions were evaluated against measured contact data collected via a systematic grid-based scan using three metrics: the tactile centroid deviation, defined as the Euclidean distance between the geometric centers of binary contact regions; the grasp success rate estimated by a pretrained grasp assessment network; and the structural similarity index to assess local structural fidelity. Experiments on cuboidal, spherical, and cylindrical objects demonstrated the effectiveness of the approach in predicting unseen contact and identifying safe zones where extrapolated and real contacts align. The results showed reliable performance for small rigid objects, with the shape classifier achieving 94.3% accuracy on a held-out test set. However, a reduced accuracy was observed for larger, highly curved geometries, likely due to the limited curvature resolution of the tactile sensors. Large-diameter cylinders are occasionally misclassified as cuboids. Potential improvements include enlarging the dataset, refining the classifier, and integrating high-resolution sensors to enhance adaptability and precision.
Shape-aware tactile extrapolation
- [1] A. Billard and D. Kragic, “Trends and challenges in robot manipulation,” Science, Vol.364, No.6446, Article No.eaat8414, 2019. https://doi.org/10.1126/science.aat8414
- [2] F. Vicentini, “Collaborative robotics: A survey,” J. of Mechanical Design, Vol.143, No.4, Article No.040802, 2021. https://doi.org/10.1115/1.4046238
- [3] L. Zaidi, J. A. Corrales, B. C. Bouzgarrou, Y. Mezouar, and L. Sabourin, “Model-based strategy for grasping 3D deformable objects using a multi-fingered robotic hand,” Robotics and Autonomous Systems, Vol.95, pp. 196-206, 2017. https://doi.org/10.1016/j.robot.2017.06.011
- [4] H.-Y. Lin, S.-C. Liang, and Y.-K. Chen, “Robotic grasping with multi-view image acquisition and model-based pose estimation,” IEEE Sensors J., Vol.21, No.10, pp.11870-11878, 2021. https://doi.org/10.1109/JSEN.2020.3030791
- [5] M. W. Spong, “An historical perspective on the control of robotic manipulators,” Annual Review of Control, Robotics, and Autonomous Systems, Vol.5, pp. 1-31, 2022. https://doi.org/10.1146/annurev-control-042920-094829
- [6] O. Kroemer, S. Niekum, and G. Konidaris, “A review of robot learning for manipulation: Challenges, representations, and algorithms,” J. of Machine Learning Research, Vol.22, No.1, pp. 1395-1476, 2021.
- [7] H. Zhang, J. Tang, S. Sun, and X. Lan, “Robotic grasping from classical to modern: A survey,” arXiv:2202.03631, 2022. https://doi.org/10.48550/arXiv.2202.03631
- [8] H. Wang, Z. Liu, L. Zhou, H. Yin, and M. H. Ang, “PEGG-Net: Pixel-wise efficient grasp generation in complex scenes,” 2024 IEEE Int. Conf. on Cybernetics and Intelligent Systems (CIS) and IEEE Int. Conf. on Robotics, Automation and Mechatronics (RAM), pp. 199-206, 2024. https://doi.org/10.1109/CIS-RAM61939.2024.10672873
- [9] J. Shi et al., “ASGrasp: Generalizable transparent object reconstruction and grasping from RGB-D active stereo camera,” arXiv:2405.05648v1, 2024. https://doi.org/10.48550/arXiv.2405.05648
- [10] X. Mao et al., “Learning fine pinch-grasp skills using tactile sensing from a few real-world demonstrations,” arXiv:2307.04619, 2024. https://doi.org/10.48550/arXiv.2307.04619
- [11] R. Calandra et al., “The feeling of success: Does touch sensing help predict grasp outcomes?,” arXiv:1710.05512v1, 2017. https://doi.org/10.48550/arXiv.1710.05512
- [12] D. Morrison, P. Corke, and J. Leitner, “EGAD! An evolved grasping analysis dataset for diversity and reproducibility in robotic manipulation,” IEEE Robotics and Automation Letters, Vol.5, No.3, pp. 4368-4375, 2020. https://doi.org/10.1109/LRA.2020.2992195
- [13] M. R. Motamedi, D. Florant, and V. Duchaine, “A wearable haptic device based on twisting wire actuators for feedback of tactile pressure information,” J. Robot. Mechatron., Vol.27, No.4, pp. 419-429, 2015. https://doi.org/10.20965/jrm.2015.p0419
- [14] C. Ferrari and J. Canny, “Planning optimal grasps,” 1992 IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 2290-2295, 1992. https://doi.org/10.1109/ROBOT.1992.219918
- [15] A. Bicchi and V. Kumar, “Robotic grasping and contact: A review,” 2000 IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 348-353, 2000. https://doi.org/10.1109/ROBOT.2000.844081
- [16] H. Jahanshahi and Z. H. Zhu, “Review of machine learning in robotic grasping control in space application,” Acta Astronautica, Vol.270, pp. 37-61, 2024. https://doi.org/10.1016/j.actaastro.2024.04.012
- [17] Z. Lu et al., “Visual-tactile robot grasping based on human skill learning from demonstrations using a wearable parallel hand exoskeleton,” IEEE Robotics and Automation Letters, Vol.8, No.9, pp. 5384-5391, 2023. https://doi.org/10.1109/LRA.2023.3295296
- [18] Y. Chebotar, K. Hausman, Z. Su, G. S. Sukhatme, and S. Schaal, “Self-supervised regrasping using spatio-temporal tactile features and reinforcement learning,” 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1960-1966, 2016. https://doi.org/10.1109/IROS.2016.7759309
- [19] Y. Domae, A. Noda, T. Nagatani, and W. Wan, “Robotic general parts feeder: Bin-picking, regrasping, and kitting,” 2020 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 5004-5010, 2020. https://doi.org/10.1109/ICRA40945.2020.9197056
- [20] F. R. Hogan, M. Bauza, O. Canal, E. Donlon, and A. Rodriguez, “Tactile regrasp: Grasp adjustments via simulated tactile transformations,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2963-2970, 2018. https://doi.org/10.1109/IROS.2018.8593528
- [21] J. Kwiatkowski, M. Jolaei, A. Bernier, and V. Duchaine, “The good grasp, the bad grasp, and the plateau in tactile-based grasp stability prediction,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4653-4659, 2022. https://doi.org/10.1109/IROS47612.2022.9981360
- [22] F. Guo et al., “Event-driven tactile sensing with dense spiking graph neural networks,” IEEE Trans. on Instrumentation and Measurement, Vol.74, Article No.2508113, 2025. https://doi.org/10.1109/TIM.2025.3541787
- [23] Y. Hu et al., “Learning robust grasping strategy through tactile sensing and adaption skill,” 2024 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 1197-1202, 2024. https://doi.org/10.1109/ROBIO64047.2024.10907398
- [24] Q. Wan and R. D. Howe, “Modeling the effects of contact sensor resolution on grasp success,” IEEE Robotics and Automation Letters, Vol.3, No.3, pp. 1933-1940, 2018. https://doi.org/10.1109/LRA.2018.2807581
- [25] D. Cockbum, J.-P. Roberge, T.-H.-L. Le, A. Maslyczyk, and V. Duchaine, “Grasp stability assessment through unsupervised feature learning of tactile images,” 2017 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2238-2244, 2017. https://doi.org/10.1109/ICRA.2017.7989257
- [26] J. Kwiatkowski, D. Cockburn, and V. Duchaine, “Grasp stability assessment through the fusion of proprioception and tactile signals using convolutional neural networks,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 286-292, 2017. https://doi.org/10.1109/IROS.2017.8202170
- [27] E. Hyttinen, D. Kragic, and R. Detry, “Learning the tactile signatures of prototypical object parts for robust part-based grasping of novel objects,” 2015 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4927-4932, 2015. https://doi.org/10.1109/ICRA.2015.7139883
- [28] Y. Tanaka, S. Shiraki, K. Katayama, K. Minamizawa, and D. Prattichizzo, “Bilaterally shared haptic perception for human-robot collaboration in grasping operation,” J. Robot. Mechatron., Vol.33, No.5, pp. 1104-1116, 2021. https://doi.org/10.20965/jrm.2021.p1104
- [29] R. Higo, T. Senoo, and M. Ishikawa, “Dynamic in-hand regrasping using a high-speed robot hand and high-speed vision,” IFAC-PapersOnLine, Vol.53, No.2, pp. 9796-9801, 2020. https://doi.org/10.1016/j.ifacol.2020.12.2671
- [30] D. Kalashnikov et al., “Scalable deep reinforcement learning for vision-based robotic manipulation,” Proc. of the 2nd Conf. on Robot Learning, pp. 651-673, 2018.
- [31] T.-H.-L. Le, A. Maslyczyk, J.-P. Roberge, and V. Duchaine, “A highly sensitive multimodal capacitive tactile sensor,” 2017 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 407-412, 2017. https://doi.org/10.1109/ICRA.2017.7989053
- [32] R. Detry, C. H. Ek, M. Madry, and D. Kragic, “Learning a dictionary of prototypical grasp-predicting parts from grasping experience,” 2013 IEEE Int. Conf. on Robotics and Automation, pp. 601-608, 2013. https://doi.org/10.1109/ICRA.2013.6630635
- [33] J.-P. Roberge, L. L’Écuyer-Lapierre, J. Kwiatkowski, P. Nadeau, and V. Duchaine, “Tactile-based object recognition using a grasp-centric exploration,” IEEE 17th Int. Conf. on Automation Science and Engineering (CASE), pp. 494-501, 2021. https://doi.org/10.1109/CASE49439.2021.9551491
- [34] B. Zhang, Y. Zhang, J. Liu, and B. Wang, “FGFF descriptor and modified Hu moment-based hand gesture recognition,” Sensors, Vol.21, No.19, Article No.6525, 2021. https://doi.org/10.3390/s21196525
- [35] X. Shu, Q. Zhang, J. Shi, and Y. Qi, “A comparative study on weighted central moment and its application in 2D shape retrieval,” Information, Vol.7, No.1, Article No.10, 2016. https://doi.org/10.3390/info7010010
- [36] Y. Wang, T. Li, and Y. Jiang, “Center-of-mass location estimation for improving the adaptability of grasping failure recovery policy,” IEEE Trans. on Industrial Electronics, Vol.72, No.9, pp. 9333-9343, 2025. https://doi.org/10.1109/TIE.2025.3544201
- [37] Z. Wang, A. C. Bovik, H. R. Sheikh, and E. P. Simoncelli, “Image quality assessment: From error visibility to structural similarity,” IEEE Trans. on Image Processing, Vol.13, No.4, pp. 600-612, 2004. https://doi.org/10.1109/TIP.2003.819861
- [38] B. A. De la Cruz Sánchez and J.-P. Roberge, “A hybrid elastic-hyperelastic approach for simulating soft tactile sensors,” Frontiers in Robotics and AI, Vol.12, Article No.1639524, 2025. https://doi.org/10.3389/frobt.2025.1639524
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.