Paper:
Development and Application of Wide-Range Precise Proximity Sensor
Shun Hasegawa*
 , Ayaha Nagata**
, Aoi Nakane*
, Masahiro Matsumura***, and Kei Okada*
, Ayaha Nagata**
, Aoi Nakane*
, Masahiro Matsumura***, and Kei Okada*
*Graduate School of Information Science and Technology, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
**Graduate School of Interdisciplinary Information Studies, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
***Kubota Global Institute of Technology, Kubota Corporation
1-11 Takumi-cho, Sakai-ku, Sakai, Osaka 590-0908, Japan

In this study, we defined a proximity sensor based on the fusion of an optical reflection intensity sensor and optical time-of-flight (ToF) sensor as a wide-range precise proximity sensor (WrPPS). This sensor can detect objects over a wide range, has low dependence on the physical properties of the detected object, and can be configured in a compact form. To allow the broad application of this sensor, we propose a WrPPS Single Board that packages the minimal configuration of this sensor onto a compact printed circuit board, allowing applications wherever this board can be mounted. Furthermore, to improve the accessibility of this board and allow easy application by anyone, we sell the board at a low price and release the fusion software for the intensity and ToF sensors as open-source software. The distance measurement accuracy of this sensor was quantitatively evaluated through experiments involving variations in the reflective properties, shape, and pose of the measurement target. To demonstrate the wide applicability of this sensor, we present examples of its applications, including grasping of compliant objects, tactile sensing in a stuffed robot, slip detection during walking, and agricultural plant sensing.
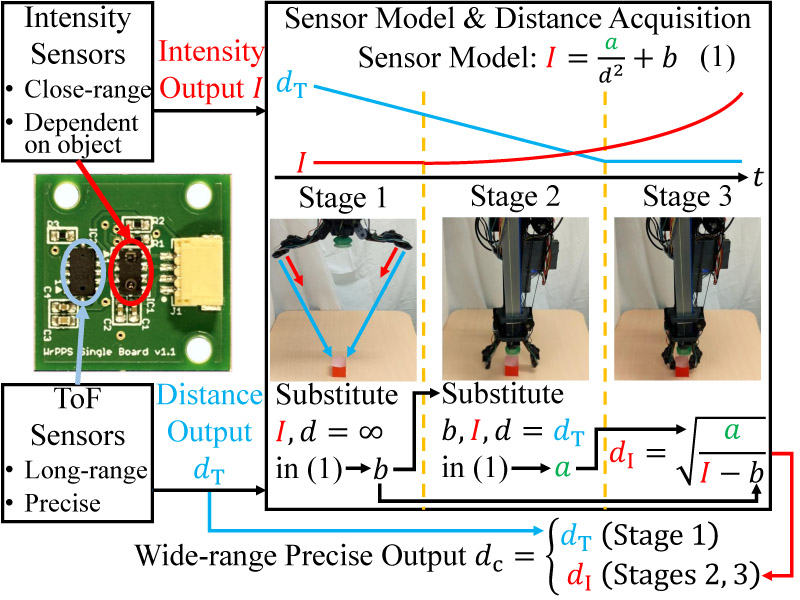
Principle of the WrPPS
- [1] A. R. Johnston, “Proximity sensor technology for manipulator end effectors,” Mechanism and Machine Theory, Vol.12, Issue 1, pp. 95-109, 1977. https://doi.org/10.1016/0094-114X(77)90061-1
- [2] R. Patel, R. Cox, and N. Correll, “Integrated proximity, contact and force sensing using elastomer-embedded commodity proximity sensors,” Autonomous Robots, Vol.42, No.7, pp. 1443-1458, 2018. https://doi.org/10.1007/s10514-018-9751-4
- [3] S. Hasegawa, K. Wada, K. Okada, and M. Inaba, “A Three-Fingered Hand with a Suction Gripping System for Warehouse Automation,” J. Robot. Mechatron., Vol.31, No.2, pp. 289-304, 2019. https://doi.org/10.20965/jrm.2019.p0289
- [4] K. Koyama, M. Shimojo, A. Ming, and M. Ishikawa, “Integrated control of a multiple-degree-of-freedom hand and arm using a reactive architecture based on high-speed proximity sensing,” The Int. J. of Robotics Research, Vol.38, Issue 14, pp. 1717-1750, 2019. https://doi.org/10.1177/0278364919875811
- [5] S. Armleder, F. Bergner, J. R. Guadarrama-Olvera, J. Nakanishi, and G. Cheng, “Real-Time Control of a Humanoid Robot for Whole-Body Tactile Interaction,” Advanced Intelligent Systems, Vol.7, Issue 12, Article No.e2500149, 2025. https://doi.org/10.1002/aisy.202500149
- [6] R. Wistort and J. R. Smith, “Electric field servoing for robotic manipulation,” 2008 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 494-499, 2008. https://doi.org/10.1109/IROS.2008.4650721
- [7] P. E. Lancaster, J. R. Smith, and S. S. Srinivasa, “Improved Proximity, Contact, and Force Sensing via Optimization of Elastomer-Air Interface Geometry,” 2019 Int. Conf. on Robotics and Automation (ICRA), pp. 3797-3803, 2019. https://doi.org/10.1109/ICRA.2019.8793959
- [8] U. Nunes, P. Faia, and A. T. de Almeida, “Sensor-based 3-D autonomous contour-following control,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS’94), Vol.1, pp. 172-179, 1994. https://doi.org/10.1109/IROS.1994.407394
- [9] L.-T. Jiang and J. R. Smith, “Seashell effect pretouch sensing for robotic grasping,” 2012 IEEE Int. Conf. on Robotics and Automation, pp. 2851-2858, 2012. https://doi.org/10.1109/ICRA.2012.6224985
- [10] D. Guo, P. Lancaster, L.-T. Jiang, F. Sun, and J. R. Smith, “Transmissive optical pretouch sensing for robotic grasping,” 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 5891-5897, 2015. https://doi.org/10.1109/IROS.2015.7354214
- [11] G. B. Avanzini, N. M. Ceriani, A. M. Zanchettin, P. Rocco, and L. Bascetta, “Safety Control of Industrial Robots Based on a Distributed Distance Sensor,” IEEE Trans. on Control Systems Technology, Vol.22, Issue 6, pp. 2127-2140, 2014. https://doi.org/10.1109/TCST.2014.2300696
- [12] S. Chen, H. Guo, T. P. Tomo, S. Somlor, A. Schmitz, and S. Sugano, “Optimized Frequency Modulated Continuous Wave Radar Configuration for Proactive Collision Avoidance in Collaborative Robots,” 2025 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), 2025. https://doi.org/10.1109/AIM64088.2025.11175758
- [13] A. Yamaguchi and C. G. Atkeson, “Tactile Behaviors with the Vision-Based Tactile Sensor FingerVision,” Int. J. of Humanoid Robotics, Vol.16, No.03, Article No.1940002, 2019. https://doi.org/10.1142/S0219843619400024
- [14] K. Koyama, M. Shimojo, T. Senoo, and M. Ishikawa, “High-Speed High-Precision Proximity Sensor for Detection of Tilt, Distance, and Contact,” IEEE Robotics and Automation Letters, Vol.3, Issue 4, pp. 3224-3231, 2018. https://doi.org/10.1109/LRA.2018.2850975
- [15] K. Sasaki, K. Koyama, A. Ming, M. Shimojo, R. Plateaux, and J.-Y. Choley, “Robotic Grasping Using Proximity Sensors for Detecting both Target Object and Support Surface,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2925-2932, 2018. https://doi.org/10.1109/IROS.2018.8594430
- [16] T. D. Nguyen, T. Kim, J. Noh, H. Phung, G. Kang, and H. R. Choi, “Skin-Type Proximity Sensor by Using the Change of Electromagnetic Field,” IEEE Trans. on Industrial Electronics, Vol.68, Issue 3, pp. 2379-2388, 2021. https://doi.org/10.1109/TIE.2020.2975503
- [17] H. Kang, H. Yim, H. Sung, and H. R. Choi, “Adaptive Measurement Model-Based Fusion of Capacitive Proximity Sensor and LiDAR for Improved Mobile Robot Perception,” IEEE Robotics and Automation Letters, Vol.10, Issue 1, pp. 836-843, 2025. https://doi.org/10.1109/LRA.2024.3511432
- [18] S. Tsuji, “Wrap-Around String-Like ToF and Self-Capacitance Combined Sensor for Robots,” IEEJ Trans. on Electrical and Electronic Engineering, Vol.20, Issue 5, pp. 688-695, 2025. https://doi.org/10.1002/tee.24232
- [19] S. Hasegawa, N. Yamaguchi, K. Okada, and M. Inaba, “Online Acquisition of Close-Range Proximity Sensor Models for Precise Object Grasping and Verification,” IEEE Robotics and Automation Letters, Vol.5, Issue 4, pp. 5993-6000, 2020. https://doi.org/10.1109/LRA.2020.3010440
- [20] S. Tokiwa, H. Arita, Y. Suzuki, K. Nakashima, and K. Tahara, “Simultaneous multi-finger contact independent of reflectance using a hybrid proximity sensor combining reflected light intensity and time-of-flight,” Proc. of 2025 JSME Annual Conf. on Robotics and Mechatronics, 1A2-M02, 2025 (in Japanese).
- [21] A. Nagata, T. Makabe, I. Yanokura, and K. Okada, “Development of a Robot that Balances Plush-like Appearance and Animacy: Eyebrow Expression through Surface Deformation and Softness through Cotton Padding Bag,” Proc. of 2025 JSME Annual Conf. on Robotics and Mechatronics, 2P1-H10, 2025 (in Japanese). https://doi.org/10.1299/jsmermd.2025.2P1-H10
- [22] A. Nagata, T. Sawada, A. Ichikura, Y. Obinata, N. Kanazawa, T. Makabe, I. Yanokura, and K. Okada, “Design and Evaluation of Engaging Storytelling Experience through Interactive Scripted Performance with a Character Robot,” 2025 34th IEEE Int. Conf. on Robot and Human Interactive Communication (RO-MAN), pp. 1531-1536, 2025. https://doi.org/10.1109/RO-MAN63969.2025.11217727
- [23] X. Gao, K. Yao, K. Junge, J. Hughes, and A. G. Billard, “A Robotic Hand Surpassing Human Capabilities in Dexterity and Functionality,” 2025. https://doi.org/10.21203/rs.3.rs-5538062/v1
- [24] A. Nakane, N. Yamaguchi, I. Yanokura, and K. Okada, “Embodied functional specialization for task-driven five-fingered hand-locomanipulation,” 26th Conf. of the Society of Instrument and Control Engineers (SICE), System Integration Division, 2B3-09, 2025 (in Japanese).
- [25] A. Cirillo, G. Laudante, and S. Pirozzi, “Wire Grasping by Using Proximity and Tactile Sensors,” 2022 IEEE 5th Int. Conf. on Industrial Cyber-Physical Systems (ICPS), 2022. https://doi.org/10.1109/ICPS51978.2022.9816936
- [26] SparkFun Electronics, “Robotic Finger Sensor,” 2017. https://www.sparkfun.com/products/14200 [Accessed June 26, 2017]
- [27] Tokyo Opensource Robotics Kyokai Association, “Light Proximity Sensor Module WrPPS Single Board Now Available,” 2025 (in Japanese). https://opensource-robotics.tokyo.jp/?p=8755 [Accessed November 24, 2025]
- [28] SparkFun Electronics, “Robotic Finger Sensor v2,” 2025. https://www.sparkfun.com/robotic-finger-sensor-v2.html [Accessed July 28, 2025]
- [29] MONOist, “Proximity sensor that gives robot hands a brain is finally entering mass production, with a July 2023 release date,” 2023 (in Japanese). https://monoist.itmedia.co.jp/mn/articles/2305/17/news075.html [Accessed November 24, 2025]
- [30] SparkFun Electronics, “Qwiic,” 2025. https://www.sparkfun.com/qwiic [Accessed November 24, 2025]
- [31] Tokyo Opensource Robotics Kyokai Association, “wrpps_ros,” 2025. https://github.com/tork-a/wrpps_ros [Accessed November 24, 2025]
- [32] Kawada Robotics, “NEXTAGE – A next-generation robot able to work together with people,” 2013. http://nextage.kawada.jp/en/ [Accessed March 2, 2026]
- [33] VISHAY, “Designing the VCNL4040 Into an Application,” 2025. https://www.vishay.com/docs/84307/designingvcnl4040.pdf [Accessed March 4, 2026]
- [34] STMicroelectronics, “World’s smallest time-of-flight ranging and gesture detection sensor,” 2018. https://www.st.com/resource/en/datasheet/vl53l0x.pdf [Accessed February 18, 2020]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.