Paper:
Proximity and Contact Sensor Combining Multi-Zone ToF Sensors and a Self-Capacitance Sensor
Satoshi Tsuji

Department of Electrical Engineering, Fukuoka University
8-19-1 Nanakuma, Jonan-ku, Fukuoka, Fukuoka 814-0180, Japan

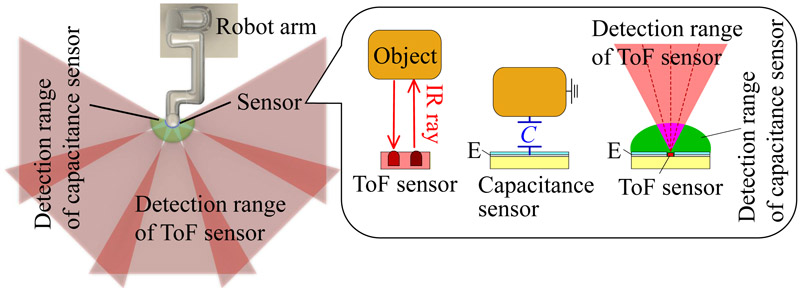
In recent years, collaborative robots (cobots) that can operate safely with humans have gained popularity. Proximity and tactile sensors contribute to the safe operation of cobots in shared workspaces. This study proposes a time-of-flight (ToF) sensor and self-capacitance proximity and contact sensor that combines five wide field-of-view multi-zone ToF sensors with a self-capacitance electrode, allowing for installation on curved surfaces such as non-driven regions near joints and achieving wide-range measurements from proximity to contact. The combination of ToF and self-capacitance sensing allows seamless detection from non-contact to contact with fewer blind spots. Furthermore, real-time control based on the acquired data was implemented, demonstrating improved safety and operational efficiency during collaborative tasks by reducing robot speed and stopping its motion when proximity is detected. The proposed method allows for both curved-surface installation, including non-driven regions near joints, and continuous detection of proximity to contact in cobot safety systems.
Proposed sensor mounted near a robot joint during measurement
- [1] F. Flacco, T. Kröger, A. De Luca, and O. Khatib, “A depth space approach to human-robot collision avoidance,” 2012 IEEE Int. Conf. on Robotics and Automation, pp. 338-345, 2012. https://doi.org/10.1109/ICRA.2012.6225245
- [2] A. Latif, A. Mughall, M. H. D. Khan, and M. D. Khan, “A safety-enhancing framework based on collaborative robots (CoBot) for Industry 4.0,” 2024 Int. Conf. on Engineering & Computing Technologies (ICECT), 2024. https://doi.org/10.1109/ICECT61618.2024.10581298
- [3] P. Chemweno and R.-J. Torn, “Innovative safety zoning for collaborative robots utilizing Kinect and LiDAR sensory approaches,” Procedia CIRP, Vol.106, pp. 209-214, 2022. https://doi.org/10.1016/j.procir.2022.02.180
- [4] A. Schmitz et al., “Methods and technologies for the implementation of large-scale robot tactile sensors,” IEEE Trans. on Robotics, Vol.27, No.3, pp. 389-400, 2011. https://doi.org/10.1109/TRO.2011.2132930
- [5] T. Mukai, S. Hirano, H. Nakashima, Y. Sakaida, and S. Guo, “Realization and safety measures of patient transfer by nursing-care assistant robot RIBA with tactile sensors,” J. Robot. Mechatron., Vol.23, No.3, pp. 360-369, 2011. https://doi.org/10.20965/jrm.2011.p0360
- [6] K. Sato, L. Canete, and T. Takahashi, “Development of a spray-coated tactile sensor – Prototype and modeling of 2D sensor on cylindrical surface –,” J. Robot. Mechatron., Vol.31, No.6, pp. 882-893, 2019. https://doi.org/10.20965/jrm.2019.p0882
- [7] M. Muroyama, H. Hirano, C. Shao, and S. Tanaka, “Development of a real-time force and temperature sensing system with MEMS-LSI integrated tactile sensors for next-generation robots,” J. Robot. Mechatron., Vol.32, No.2, pp. 323-332, 2020. https://doi.org/10.20965/jrm.2020.p0323
- [8] H. Alirezaei, A. Nagakubo, and Y. Kuniyoshi, “A tactile distribution sensor which enables stable measurement under high and dynamic stretch,” 2009 IEEE Symp. on 3D User Interfaces, pp. 87-93, 2009. https://doi.org/10.1109/3DUI.2009.4811210
- [9] T. Schlegl, T. Kröger, A. Gaschler, O. Khatib, and H. Zangl, “Virtual whiskers—Highly responsive robot collision avoidance,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 5373-5379, 2013. https://doi.org/10.1109/IROS.2013.6697134
- [10] H. Hasegawa, Y. Suzuki, A. Ming, M. Ishikawa, and M. Shimojo, “Robot hand whose fingertip covered with net-shape proximity sensor – Moving object tracking using proximity sensing –,” J. Robot. Mechatron., Vol.23, No.3, pp. 328-337, 2011. https://doi.org/10.20965/jrm.2011.p0328
- [11] T. D. Nguyen et al., “Skin-type proximity sensor by using the change of electromagnetic field,” IEEE Trans. on Industrial Electronics, Vol.68, No.3, pp. 2379-2388, 2021. https://doi.org/10.1109/TIE.2020.2975503
- [12] S. Tsuji and T. Kohama, “Proximity skin sensor using time-of-flight sensor for human collaborative robot,” IEEE Sensors J., Vol.19, No.14, pp. 5859-5864, 2019. https://doi.org/10.1109/JSEN.2019.2905848
- [13] H.-K. Lee, S.-I. Chang, and E. Yoon, “Dual-mode capacitive proximity sensor for robot application: Implementation of tactile and proximity sensing capability on a single polymer platform using shared electrodes,” IEEE Sensors J., Vol.9, No.12, pp. 1748-1755, 2009. https://doi.org/10.1109/JSEN.2009.2030660
- [14] G. Cheng et al., “A comprehensive realization of robot skin: Sensors, sensing, control, and applications,” Proc. of the IEEE, Vol.107, No.10, pp. 2034-2051, 2019. https://doi.org/10.1109/JPROC.2019.2933348
- [15] J. Liang et al., “Soft sensitive skin for safety control of a nursing robot using proximity and tactile sensors,” IEEE Sensors J., Vol.20, No.7, pp. 3822-3830, 2020. https://doi.org/10.1109/JSEN.2019.2959311
- [16] F. Giovinazzo et al., “From CySkin to ProxySKIN: Design, implementation and testing of a multi-modal robotic skin for human–robot interaction,” Sensors, Vol.24, No.4, Article No.1334, 2024. https://doi.org/10.3390/s24041334
- [17] Y. Ding, F. Wilhelm, L. Faulhammer, and U. Thomas, “With proximity servoing towards safe human-robot-interaction,” 2019 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4907-4912, 2019. https://doi.org/10.1109/IROS40897.2019.8968438
- [18] S. Tsuji and T. Kohama, “Self-capacitance proximity and tactile skin sensor with shock-absorbing structure for a collaborative robot,” IEEE Sensors J., Vol.20, No.24, pp. 15075-15084, 2020. https://doi.org/10.1109/JSEN.2020.3011701
- [19] S. Tsuji and T. Kohama, “Proximity and contact sensor for human cooperative robot by combining time-of-flight and self-capacitance sensors,” IEEE Sensors J., Vol.20, No.10, pp. 5519-5526, 2020. https://doi.org/10.1109/JSEN.2020.2969653
- [20] S. Tsuji, “Wrap-around string-like ToF and self-capacitance combined sensor for robots,” IEEJ Trans. on Electrical and Electronic Engineering, Vol.20, No.5, pp. 688-695, 2025. https://doi.org/10.1002/tee.24232
- [21] Universal Robots. https://www.universal-robots.com/ [Accessed November 10, 2025]
- [22] STMicroelectronics, VL53L7CX. https://www.st.com/en/imaging-and-photonics-solutions/vl53l7cx.html [Accessed November 10, 2025]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.