Paper:
Dynamic and Simultaneous Measurement of Force, Temperature, and Light Using Miniature Tactile Sensor
Mizuki Takahashi, Mako Nakamura, Takashi Abe, and Masayuki Sohgawa
Niigata University
8050 Ikarashi 2-no-cho, Nishi-ku, Niigata, Niigata 950-2181, Japan

In this study, a MEMS tactile sensor was designed and fabricated, with the aim of achieving integrated measurement of object contact, thermal, and proximity sensation. This sensor integrates a Si photoresistor for light detection, a microcantilever with a NiCr strain gauge for force detection, and an Au resistance thermometer detector with a heater for temperature detection. Furthermore, since both the strain gauge and the photoresistor exhibit temperature dependency, temperature compensation was applied to the measured data. Thus, it was demonstrated that a single sensor can dynamically and simultaneously measure different modalities: object contact force, thermal, and proximity sensation. Sensors equipped with both tactile and proximity capabilities are expected to enable accurate manipulation and control of grasping force.
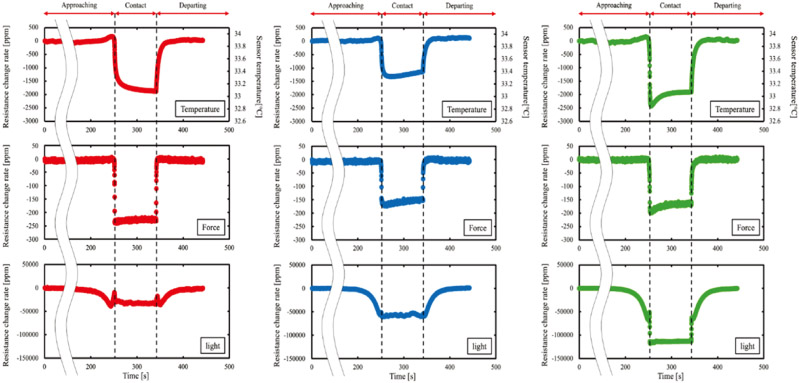
Simultaneous multimodal measurement targeting (a) Al, (b) POM, and (c) PDMS
- [1] J. Ao, Y. Song, Q. Li, H. Zeng, and T. Xu, “End-effectors for fruit and vegetable harvesting robots: A review of key technologies, challenges, and future prospects,” Agronomy, Vol.15, No.11, Article No.2650, 2025. https://doi.org/10.3390/agronomy15112650
- [2] Z. Hou et al., “Soft grasping mechanism of human fingers for tomato-picking bionic robots,” Computers and Electronics in Agriculture, Vol.182, Article No.106010, 2021. https://doi.org/10.1016/j.compag.2021.106010
- [3] W. Mandil et al., “Tactile-sensing technologies: Trends, challenges and outlook in agri-food manipulation,” Sensors, Vol.23, No.17, Article No.7362, 2023. https://doi.org/10.3390/s23177362
- [4] G. Laudante et al., “A multi-modal sensing system for human-robot interaction through tactile and proximity data,” Front. Robot. AI, Vol.12, Article No.1581154, 2025. https://doi.org/10.3389/frobt.2025.1581154
- [5] T. Fukao, “Automation and robotization of farming operations (special feature: the future of food),” J. of the Japan Society of Mechanical Engineers, Vol.127, No.1273, pp. 7-10, 2024 (in Japanese). https://doi.org/10.1299/jsmemag.127.1273_7
- [6] S. Ye, K. Suzuki, Y. Suzuki, M. Ishikawa, and M. Shimojo, “Robust robotic grasping using IR net-structure proximity sensor to handle objects with unknown position and attitude,” Proc. of the 2013 IEEE Int. Conf. on Robotics and Automation, pp. 3271-3278, 2013. https://doi.org/10.1109/ICRA.2013.6631033
- [7] T. Yamamoto, N. Wettels, J. A. Fishel, C. Lin, and G. E. Loeb, “BioTac—A biomimetic tactile sensor,” J. of the Robotics Society of Japan, Vol.30, No.5, pp. 496-498, 2012 (in Japanese). https://doi.org/10.7210/jrsj.30.496
- [8] S. Tsuchiya, Y. Suganuma, M. Muroyama, T. Nakayama, and Y. Nonomura, “Measurement of heat flow using a thermal-force sensor stick with a tactile neural network chip,” Electrical Engineering in Japan, Vol.139, No.8, pp. 258-264, 2012 (in Japanese). https://doi.org/10.1541/ieejsmas.139.258
- [9] Y. Mizoguchi, K. Tadakuma, H. Hasegawa, A. Ming, M. Ishikawa, and M. Shimojo, “Development of intelligent robot hand using proximity, contact and slip sensing,” Proc. of the 2007 IEEE Int. Conf. on Robotics and Automation, pp. 3087-3092, 2007. https://doi.org/10.1109/ROBOT.2007.363945
- [10] R. Kaneta, T. Hasegawa, T. Abe, and M. Sohgawa, “Sensitivity enhancement of MEMS tactile sensor by redesign of microcantilever and strain gauge,” 2021 IEEE SENSORS, 2021. https://doi.org/10.1109/SENSORS47087.2021.9639799
- [11] K. Takahashi, T. Abe, M. Okuyama, H. Noma, and M. Sohgawa, “Surface texture characterization using optical and tactile combined sensor,” Sens. Mater., Vol.30, No.5, pp. 1091-1101, 2018. https://doi.org/10.18494/SAM.2018.1786
- [12] S. Yokoyama, T. Kanashima, M. Okuyama, T. Abe, H. Noma, T. Higashi, and M. Sohgawa, “Proximity and tactile sensing using MEMS sensor with combined light and strain detection,” IEEJ Trans. on Sensors and Micromachines, Vol.134, No.7, pp. 229-234, 2014 (in Japanese). https://doi.org/10.1541/ieejsmas.134.229
- [13] M. Sohgawa, S. Nishimura, R. Okuno, T. Abe, and H. Noma, “Multifunctional tactile sensor using MEMS cantilevers,” Proc. of the 2014 Int. Nanoelectronics Conf. (INEC), pp. 317-318, 2014. https://doi.org/10.1109/INEC.2014.7460417
- [14] R. Araki, T. Abe, H. Noma, and M. Sohgawa, “Miniaturization and high-density arrangement of microcantilevers in proximity and tactile sensor for dexterous gripping control,” Micromachines, Vol.9, No.6, Article No.301, 2018, https://doi.org/10.3390/mi9060301
- [15] S. Ogawara, M. Sohgawa, and T. Abe, “Combined measurement of force, color, and temperature for skin diagnosis using MEMS tactile sensor,” Proc. of the JSME Annual Meeting, Vol.2020, Article No.J16312, 2020 (in Japanese). https://doi.org/10.1299/jsmemecj.2020.J16312
- [16] F. Sato et al., “Texture measurement for fabrics including warm/cool and fluffiness sensation by multimodal MEMS sensor,” 2017 19th Int. Conf. on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), pp. 343-346, 2017. https://doi.org/10.1109/TRANSDUCERS.2017.7994058
- [17] H. Sato, “S/N ratio improvement of photodetection part in MEMS composite sensor for skin diagnosis,” Proc. of the JSME Hokuriku-Shinetsu Branch 2022 Joint Conf., 2022 (in Japanese).
- [18] N. Onda, T. Kozuka, T. Abe, M. Isshiki, S. Tomeno, and M. Sohgawa, “Fabrication of heater-integrated MEMS tactile sensor for evaluation of warm and cold sensation by touching glass,” Electrical Engineering in Japan, Vol.215, No.1, Article No.e23370, 2022. https://doi.org/10.1002/eej.23370
- [19] M. Nakamura, T. Abe, and M. Sohgawa, “Integration of light and temperature sensing elements for combined visual and tactile measurement of resin compounds,” IEEJ Trans. on Sensors and Micromachines, Vol.144, No.9, pp. 252-257, 2024 (in Japanese). https://doi.org/10.1541/ieejsmas.144.252
- [20] N. Kounalakis et al., “Development of a tomato harvesting robot: Peduncle recognition and approaching,” 2021 3rd Int. Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), 2021. https://doi.org/10.1109/HORA52670.2021.9461281
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.