Paper:
Performance Evaluation of an Optical Tactile Force Sensor Using Transparent Flexible Resin
Masanori Goka and Yoshifumi Matsumoto
Department of Electrical and Electronic Engineering, Fukuyama University
1 Sanzo, Gakuen-cho, Fukuyama, Hiroshima 729-0292, Japan

This study aims to enhance tactile sensing for practical robotic applications by enabling the acquisition of dynamic contact information in optical tactile sensors. Conventional optical tactile sensors measure displacement and torque with high precision by detecting the deformation of transparent flexible resin using photoreflectors; however, they do not fully exploit information from minute vibrations or dynamic contact events. In this work, we propose a lightweight, low-cost, and robust optical tactile sensor capable of texture recognition and slippage detection without relying on acceleration sensors or piezoelectric elements, offering a simpler and more durable alternative to conventional high-definition camera-based approaches.
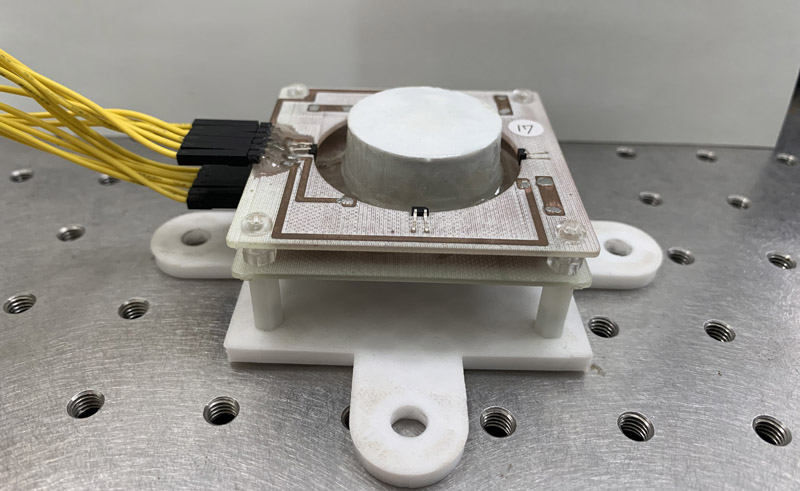
Prototype optical tactile force sensor
- [1] M. Goka, N. Nakamoto, Y. Takenawa, and N. Kida, “Design of downsized magnetic type tactile sensor,” Trans. JSME, Series C, Vol.76, No.772, pp. 3640-3647, 2010 (in Japanese). https://doi.org/10.1299/kikaic.76.3640
- [2] N. Nakamoto, M. Goka, Y. Takenawa, and N. Kida, “A magnetic type tactile sensor using GMR eiements and inductors,” Trans. JSME, Series C, Vol.76, No.766, pp. 1476-1482, 2010 (in Japanese). https://doi.org/10.1299/kikaic.76.1476
- [3] K. Hoshino, D. Mori, and M. Tomida, “An optical tactile sensor assuming cubic polynomial deformation of elastic body,” J. Robot. Mechatron., Vol.21, No.6, pp. 780-788, 2009. https://doi.org/10.20965/jrm.2009.p0780
- [4] S. Saga, H. Kajimoto, and S. Tachi, “High-resolution tactile sensor using the deformation of a reflection image,” Sensor Review, Vol.27, No.1, pp. 35-42, 2007. https://doi.org/10.1108/02602280710723451
- [5] A. Padmanabha, O. Khatib, R. Calandra, and M. Sundaralingam, “OmniTact: A multi-directional high-resolution tactile sensor,” 2020 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 618-624, 2020. https://doi.org/10.1109/ICRA40945.2020.9196712
- [6] M. Lambeta, P.-W. Chou, S. Tian, B. Yang, B. Maloon, A. Nayebzadeh, R. Calandra, and R. Hariharan, “Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,” IEEE Robotics and Automation Letters, Vol.5, No.3, pp. 3838-3845, 2020. https://doi.org/10.1109/LRA.2020.2977257
- [7] Gao et al., “TACTO: A fast, flexible, and open-source simulator for high-resolution vision-based tactile sensors,” IEEE Robotics and Automation Letters, Vol.7, No.2, pp. 3930-3937, 2022. https://doi.org/10.1109/LRA.2022.3146945
- [8] N. F. Lepora, “Soft biomimetic optical tactile sensing with the TacTip: A review,” IEEE Sensors J., Vol.21, No.19, pp. 21131-21143, 2021. https://doi.org/10.1109/JSEN.2021.3100645
- [9] J. W. James, S. J. Redmond, and N. F. Lepora, ”A biomimetic tactile fingerprint induces incipient slip,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 9833-9839,2020. https://doi.org/10.1109/IROS45743.2020.9341310
- [10] D. F. Gomes, Z. Lin, and S. Luo, “GelTip: A finger-shaped optical tactile sensor,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 9903-9909, 2020. https://doi.org/10.1109/IROS45743.2020.9340881
- [11] E. Donlon, S. Dong, M. Liu, J. Li, E. Adelson, and A. Rodriguez, “Gelslim: A high-resolution, compact, robust, and calibrated tactile-sensing finger,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1927-1934, 2018. https://doi.org/10.1109/IROS.2018.8593661
- [12] S. Dong, W. Yuan, and E. H. Adelson, “Improved GelSight tactile sensor for measuring geometry and slip,” Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), pp. 137-144, 2017. https://doi.org/10.1109/IROS.2017.8202149
- [13] M. Yukihira and M. Goka, “Miniaturization of an optical tactile sensor and its application to soft robotics,” Proc. of 25th SICE System Integration Division Annual Conf. (SI2023), 2023 (in Japanese).
- [14] M. Yukihira and M. Goka, “Development and performance evaluation of an optical tactile sensor using transparent flexible resin,” Proc. of the SICE Annual Conf. 2024, pp. 294-299, 2024.
- [15] M. Yukihira and M. Goka, “Improvement of an optical tactile sensor and its application,” Proc. 33rd SICE Chugoku Chapter Annual Conf., pp. 17-18, 2024 (in Japanese).
- [16] T. Baumberger and C. Caroli, “Solid friction from stick–slip down to pinning and aging,” Advances in Physics, Vol.55, Nos.3-4, pp. 279-348, 2006. https://doi.org/10.1080/00018730600732186
- [17] R. S. Johansson and J. R. Flanagan, “Coding and use of tactile signals from the fingertips in object manipulation tasks,” Nature Reviews Neuroscience, Vol.10, pp. 345-359, 2009. https://doi.org/10.1038/nrn2621
- [18] M. Goka, “Optical tactile sensor using transparent flexible resin,” N. Tanio (Ed.), “High-Performance Transparent Polymers: Development and Applications,” CMC Publishing Co., Ltd., pp. 216-223, 2022 (in Japanese).
- [19] M. Goka, “Development of an optical tactile sensor using transparent soft resin,” Japan Plastics, Vol.72, No.6, pp. 123-127, 2021 (in Japanese).
- [20] M. Goka, “Optical tactile sensor using transparent flexible resin,” Bio Industry, Vol.38, No.6, pp. 24-31, 2021 (in Japanese).
- [21] M. Tanaka, “Investigation of Tactile Mechanism and a Tactile Sensor System,” J. of the Japan Society for Precision Engineering, Vol.82, No.1, pp. 20-25, 2016. https://doi.org/10.2493/jjspe.82.20
- [22] OnRobot, “OptoForce Force/Torque Sensors.” https://onrobot.com/en/products/optoforce [Accessed May 20, 2026]
- [23] BL AUTOTEC Co., Ltd., “6-Axis Force Sensor Product Information.” https://www.bl-autotec.co.jp/products/ [Accessed February 15, 2025]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.