Paper:
Surface Distortion Mapping System Narrowing Down Existence Probability via Touch Scanning
Yui Suzuki and Hiromi Mochiyama

University of Tsukuba
1-1-1 Tennodai, Tsukuba, Ibaraki 305-8573, Japan

This study proposes and develops a surface-scanning tactile sensor and mapping system that amplifies strain gauge signals to enable the detection of minute defects. The research objectives include: (1) developing high-strength, high-sensitivity sensing for distortions of tens of micrometers; (2) constructing a system capable of rapidly scanning a large inspection area; and (3) visualizing and digitizing defect locations. To achieve these objectives, three key approaches were implemented. First, we developed a tactile sensor with a simple, flexible structural design. By arranging pins parallel to the strain gauges, the sensor effectively amplifies mechanical deformation to increase output. Experiments showed that the proposed sensor achieves signal amplification of approximately 7.6 times compared to a strain gauge-only sensor and produces an output approximately 3.3 times greater than that of a conventional sensor. Second, because the sensor cannot independently determine positional information, we estimated positions using a marker-based approach. Specifically, we measured the distance between a target marker attached to the sensor and a reference marker during scanning. The accuracy was evaluated using a dimensionless error metric normalized by the 60 mm gauge length, and the system yielded an error of 7.6% with a standard deviation of 5.5 mm. Third, we developed a system capable of probabilistically estimating the precise location of micro-surface distortions. The strain gauges used in current tactile sensors have a gauge length of 60 mm, which introduces the limitation that the exact location of a micro-surface distortion cannot be determined from a single measurement. To address this limitation, we developed a method that increases the probability of detecting micro-surface distortions through repeated scanning, thereby progressively narrowing the estimated detection range.
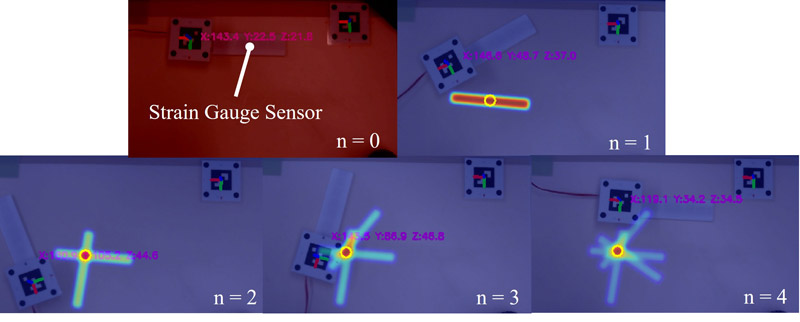
Process of narrowing down the estimated position based on the existence probability
- [1] R. Kikuuwe, A. Sano, H. Mochiyama, and N. Takesue, “Enhancing haptic detection of surface undulation,” ACM Trans. on Applied Perceptions, Vol.2, No.1, pp. 46-67, 2005. https://doi.org/10.1145/1048687.1048691
- [2] Y. Tanaka, H. Sato, and H. Fujimoto, “Development of a finger-mounted tactile sensor for surface irregularity detection,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 690-696, 2007. https://doi.org/10.1109/IROS.2007.4399396
- [3] T. Takei, M. Ando, and H. Mochiyama, “Wearable artificial skin layer for the reconstruction of touched geometry by morphological computation,” Adv. Robot., Vol.32, No.21, pp. 1122-1134, 2018. https://doi.org/10.1080/01691864.2018.1534610
- [4] A. Sano, H. Mochiyama, N. Takesue, R. Kikuuwe, and H. Fujimoto, “TouchLens: Touch enhancing tool,” Proc. IEEE Conf. Robot. Autom., pp. 71-72, 2004. https://doi.org/10.1109/TEXCRA.2004.1425003
- [5] M. Johnson and E. Adelson, “Retrographic sensing for the measurement of surface texture and shape,” Proc. 2009 IEEE Conf. Computer Vision and Pattern Recognition (CVPR 2009), pp. 1070-1077, 2009. https://doi.org/10.1109/CVPR.2009.5206534
- [6] R. Kikuuwe, A. Sano, H. Mochiyama, N. Takesue, and H. Fujimoto, “A tactile sensor capable of mechanical adaptation and its use as a surface deflection detector,” Proc. IEEE Sensors, pp. 256-259, 2004. https://doi.org/10.1109/ICSENS.2004.1426150
- [7] M. Ando, T. Takei, and H. Mochiyama, “Rubber artificial skin layer with flexible structure for shape estimation of micro-undulation surfaces,” ROBMECH J., Vol.7, Article No.11, 2020. https://doi.org/10.1186/s40648-020-00159-0
- [8] M. Ando, H. Mochiyama, T. Takei, and H. Fujimoto, “Effect of tactile contact lens on rubber artificial skin layer with a strain gauge,” 2016 IEEE/SICE Int. Symp. on System Integration (SII), Vol.7, No.11, pp. 397-402, 2016. https://doi.org/10.1109/SII.2016.7844031
- [9] M. Ando, R. Tokumine, T. Takei, and H. Mochiyama, “Tactile scanning for detecting micro bump by strain-sensitive artificial skin,” IEEE Robotics and Automation Letters, Vol.6, No.4, pp. 7541-7548, 2021. https://doi.org/10.1109/LRA.2021.3098473
- [10] D.-H. Kim, N. Lu, R. Ma, Y.-S. Kim, R.-H. Kim, S. Wang, J. Wu, S. Won, H. Tao, A. Islam, K. J. Yu, T.-I. Kim, R. Chowdhury, M. Ying, L. Xu, M. Li, H.-J. Chung, H. Keum, M. M. Cormick, P. Liu, Y.-W. Zhang, F. G. Omenetto, Y. Huang, T. Coleman, and J. A. Rogers, “Epidermal electronics,” Science, Vol.333, No.6044, pp. 838-843, 2011. https://doi.org/10.1126/science.1206157
- [11] M. Kaltenbrunner, T. Sekitani, J. Reeder, T. Yokota, K. Kuribara, T. Tokuhara, M. Drack, R. Schwödiauer, I. Graz, S. Bauer-Gogonea, S. Bauer, and T. Someya, “An ultra-lightweight design for imperceptible plastic electronics,” Nature, Vol.499, pp. 458-463, 2013. https://doi.org/10.1038/nature12314
- [12] S. Wang, J. Xu, W. Wang, G.-J. N. Wang, R. Rastak, F. Molina-Lopez, S. N. Jong Won Chung, V. R. Feig, J. Lopez, T. Lei, S.-K. Kwon, Y. Kim, A. M. Foudeh, A. Ehrlich, A. Gasperini, Y. Yun, B. Murmann, J. B.-H. Tok, and Z. Bao, “Skin electronics from scalable fabrication of an intrinsically stretchable transistor array,” Nature, Vol.555, pp. 83-88, 2018. https://doi.org/10.1038/nature25494
- [13] “Gelsight” https://www.gelsight.com/ [Accessed May 17, 2026]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.