Paper:
State Estimation of a Shape-Flexible Multifingered Robotic Hand Leveraging Multiple Proximity Sensors
Masato Morita
 , Hikaru Arita
, Kazuto Nakashima
, and Kenji Tahara
, Hikaru Arita
, Kazuto Nakashima
, and Kenji Tahara
Kyushu University
744 Motooka, Nishi-ku, Fukuoka, Fukuoka 819-0395, Japan

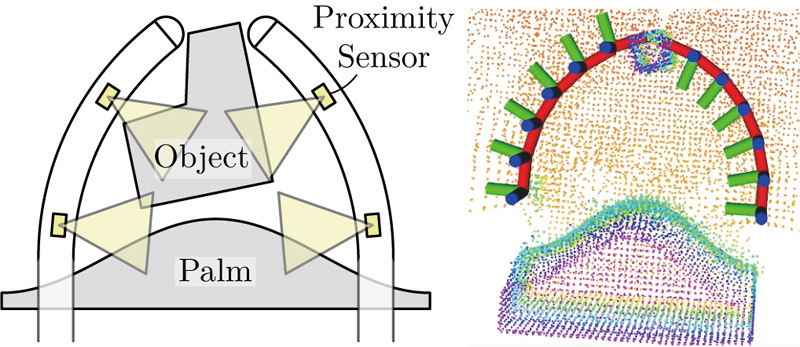
This paper investigates state estimation for continuum robotic fingers in feature-sparse and dynamic in-hand manipulation environments. Continuum fingers, inspired by continuum robots, offer enhanced flexibility and wider reachable workspace compared with conventional rigid-link fingers to enable grasping and manipulation tasks. However, they lack encoder-based joint angle measurements, making it difficult to determine fingertip positions, particularly under external forces during contact. This limitation hinders precision grasping and prevents the full exploitation of their high dexterity. To address this challenge, we developed a simultaneous localization and mapping framework for continuum fingers using proximity sensors. Unlike conventional simultaneous localization and mapping that assumes feature-rich environments, grasping scenarios present feature-sparse conditions with limited environmental information. We propose an estimator that fuses proximity sensing with a constant-curvature kinematic prior by replacing encoder angles with virtual joint angles. The key idea is to leverage the designed in-hand elements, namely opposing fingers and the palm, as stable reference geometry. Simulations demonstrate that the proposed estimator outperforms a kinematics-only baseline by suppressing bias and reducing position error. Three-dimensional contoured palms enhance observability, with a composite wavy palm yielding the smallest errors without temporal drift. These findings indicate that the designed in-hand geometry combined with temporal map management enables effective state estimation for continuum fingers in feature-sparse and dynamic grasping scenarios.
SLAM-based continuum finger estimation
- [1] M. Suomalainen, Y. Karayiannidis, and V. Kyrki, “A survey of robot manipulation in contact,” Robot. Auton. Syst., Vol.156, Article No.104224, 2022. https://doi.org/10.1016/j.robot.2022.104224
- [2] S. Suresh, H. Qi, T. Wu, T. Fan, L. Pineda, M. Lambeta, J. Malik, M. Kalakrishnan, R. Calandra, M. Kaess, J. Ortiz, and M. Mukadam, “NeuralFeels with neural fields: Visuotactile perception for in-hand manipulation,” Sci. Robot., Vol.9, No.96, Article No.eadl0628, 2024. https://doi.org/10.1126/scirobotics.adl0628
- [3] W. Zhao, Y. Zhang, and N. Wang, “Soft Robotics: Research, Challenges, and Prospects,” J. Robot. Mechatron., Vol.33, No.1, pp. 45-68, 2021. https://doi.org/10.20965/jrm.2021.p0045
- [4] D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, Vol.521, No.7553, pp. 467-475, 2015. https://doi.org/10.1038/nature14543
- [5] J. Burgner-Kahrs, D. C. Rucker, and H. Choset, “Continuum Robots for Medical Applications: A Survey,” IEEE Trans. Robot., Vol.31, No.6, pp. 1261-1280, 2015. https://doi.org/10.1109/tro.2015.2489500
- [6] J. M. Ferguson, D. C. Rucker, and R. J. Webster, “Unified Shape and External Load State Estimation for Continuum Robots,” IEEE Trans. Robot., Vol.40, pp. 1813-1827, 2024. https://doi.org/10.1109/tro.2024.3360950
- [7] Z. Wang, G. Wang, X. Chen, and N. M. Freris, “Kinematic Modeling and Control of a Soft Robotic Arm with Non-constant Curvature Deformation,” Proc. IEEE Int. Conf. Robot. Autom. (ICRA), pp. 12749-12755, 2024. https://doi.org/10.1109/icra57147.2024.10611049
- [8] S. E. Navarro, S. Muhlbacher-Karrer, H. Alagi, H. Zangl, K. Koyama, B. Hein, C. Duriez, and J. R. Smith, “Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications,” IEEE Trans. Robot., Vol.38, No.3, pp. 1599-1620, 2022. https://doi.org/10.1109/tro.2021.3111786
- [9] H. Arita, “A fast optical proximity sensor skin that contains an analog computing circuit and can cover an entire link,” Adv. Robot., Vol.37, No.17, pp. 1083-1099, 2023. https://doi.org/10.1080/01691864.2023.2239320
- [10] S. J. Moon, J. Kim, H. Yim, Y. Kim, and H. R. Choi, “Real-Time Obstacle Avoidance Using Dual-Type Proximity Sensor for Safe Human-Robot Interaction,” IEEE Robot. Autom. Lett., Vol.6, No.4, pp. 8021-8028, 2021. https://doi.org/10.1109/lra.2021.3102318
- [11] Y. Ding, F. Wilhelm, L. Faulhammer, and U. Thomas, “With Proximity Servoing towards Safe Human-Robot-Interaction,” Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), pp. 4907-4912, 2019. https://doi.org/10.1109/iros40897.2019.8968438
- [12] S. Suyama, M. Nakajima, H. Arita, and M. Tanaka, “Control of a Snake Robot With Proximity Sensors to Adapt for Two Variable Planes,” IEEE Access, Vol.12, pp. 46864-46880, 2024. https://doi.org/10.1109/access.2024.3382205
- [13] X. Yue, Y. Zhang, J. Chen, J. Chen, X. Zhou, and M. He, “LiDAR-based SLAM for robotic mapping: state of the art and new frontiers,” Ind. Robot., Vol.51, No.2, pp. 196-205, 2024. https://doi.org/10.1108/ir-09-2023-0225
- [14] M. Klingensmith, S. S. Sirinivasa, and M. Kaess, “Articulated Robot Motion for Simultaneous Localization and Mapping (ARM-SLAM),” IEEE Robot. Autom. Lett., Vol.1, No.2, pp. 1156-1163, 2016. https://doi.org/10.1109/lra.2016.2518242
- [15] C. Sorensen, P. Hyatt, M. Ricks, S. Nielsen, and M. D. Killpack, “Soft Robot Configuration Estimation and Control Using Simultaneous Localization and Mapping,” Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), pp. 616-623, 2021. https://doi.org/10.1109/iros51168.2021.9635896
- [16] K. Iwao, H. Arita, and K. Tahara, “State Estimation and Environment Recognition for Articulated Structures via Proximity Sensors Distributed over the Whole Body,” IEEE Robot. Autom. Lett., Vol.10, No.3, pp. 3030-3037, 2025. https://doi.org/10.1109/lra.2025.3539117
- [17] M. Morita, H. Arita, A. Kanada, and K. Tahara, “Multi-fingered Robotic Hand with Shape Flexibility for Expanding the Feasible Range of In-hand Manipulation,” Proc. IEEE/SICE Int. Symp. Syst. Integr. (SII), pp. 216-221, 2025. https://doi.org/10.1109/SII59315.2025.10870904
- [18] M. Morita, K. Iwao, H. Arita, and K. Tahara, “State Estimation of a Shape-flexible Multi-fingered Hand Using Multiple ToF Sensors,” Proc. SICE Syst. Integr. Div. Annu. Conf. (SI2024), pp. 1399-1400, 2024 (in Japanese).
- [19] M. Morita, H. Arita, K. Nakashima, and K. Tahara, “State Estimation of a Shape-flexible Multi-fingered Robotic Hand Leveraging Multiple Proximity Sensors Measuring an Ambient Environment including the Self-body and a Constant Curvature Model,” Proc. IEEE/SICE Int. Symp. Syst. Integr. (SII), 2026. https://doi.org/10.1109/SII64115.2026.11404608
- [20] M. Morita, K. Iwao, H. Arita, K. Nakashima, and K. Tahara, “State Estimation of a Shape-flexible Multi-fingered Robotic Hand Using Multiple Proximity Sensors Measuring an Ambient Environment including the Self-body,” Proc. JSME Robot. Mechatron. Conf. (Robomec), 1P1-L03, 2025 (in Japanese).
- [21] W. Xu, Y. Cai, D. He, J. Lin, and F. Zhang, “FAST-LIO2: Fast Direct LiDAR-Inertial Odometry,” IEEE Trans. Robot., Vol.38, No.4, pp. 2053-2073, 2022. https://doi.org/10.1109/tro.2022.3141876
- [22] STMicroelectronics, “Time-of-flight (tof) 8x8 multizone ranging sensor with wide field of view.” https://www.st.com/en/imaging-and-photonics-solutions/vl53l5cx.html [Accessed November 20, 2025].
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.