Paper:
Development of Bio-Inspired Low-Noise Propeller for a Drone
Ryusuke Noda*, Toshiyuki Nakata**, Teruaki Ikeda**, Di Chen**, Yuma Yoshinaga**, Kenta Ishibashi**, Chen Rao**, and Hao Liu**
*Department of Mechanical Engineering, Kanto Gakuin University
1-50-1 Mutsuura-Higashi, Kanazawa-ku, Yokohama-shi, Kanagawa 236-8501, Japan
**Graduate School of Engineering, Chiba University
1-33 Yayoi-cho, Inage-ku, Chiba-shi, Chiba 263-8522, Japan

Multicopter-type unmanned aerial vehicles, called drones, have been attracting wide attention because of their immense potential for use in various missions such as surveillance, reconnaissance, and delivery service. For the application of drones, however, their noise will be a serious issue especially when operating in urban areas, and to our knowledge, it has not been resolved yet. In this study, inspired by the unique wing structures of insects and birds, we have developed new low-noise-type propellers for drones. The various bio-inspired attachments of drones such as the serrations at the leading edge, velvet-like surface, and fringes at the trailing edge were tested, and their acoustic and aerodynamic performances were evaluated experimentally and numerically. Our results indicate that an attachment at the trailing edge can suppress the noise level while maintaining the aerodynamic efficiency of the proposed propeller close to that of the basic propeller.
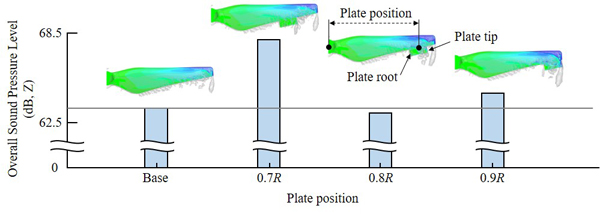
Z-weighted sound pressure levels of basic and plate attached propellers
- [1] K. Nonami, “Drone technology, cutting-edge drone business, and future prospects,” J. of Robotics and Mechatronics, Vol.28, pp. 262-272, 2016.
- [2] A. Rothstein, “Drone (Object Lessons),” Bllomsbury Publishing, New York, Chapter 1, 2015
- [3] A. Christian and R. Cabell, “Initial investigation into the psychoacoustic properties of small unmanned aerial system noise,” AIAA Aviation Technology, Integration, and Operations Conf. (AVIATION 2017), Denver, CO, June 5-9, 2017.
- [4] C. Sabo, A. Cope, K. Gurny, E. Vasilaki, and J. A. Marshall, “Bio-inspired visual navigation for a quadcopter using optic flow,” AIAA infotech@Aerospace, San Diego, CA, January 4-8, 2016.
- [5] J. Keshavan, G. Gremillion, H. Escobar-Alravez, and J. S. Humbert, “A μ analysis-based controller-synthesis framework for robust bioinspired visual navigation in less-structured environments,” Bioinspiration and Biomimetics, Vol.9, p. 25011, 2014.
- [6] S. Mintichev, S. Rivaz and D. Floreano, “Insect-inspired mechanical resilience for multicopters,” IEEE Robotics and automation letters, Vol.2, pp. 1248-1255, 2017.
- [7] L. Henderson, T. Glaser, and F. Kuester, “Towards bio-inspired structural design of a 3D printable, ballistically deployable, multi-rotor UAV,” IEEE Aerospace Conf., Big Sky, MT, March 4-11, 2017.
- [8] H. Wagner, M. Weger, M. Klaas, and W. Schro, “Features of owl wings that promote silent flight,” Interface Focus, Vol.7, p. 20160078, 2017.
- [9] J. R. Usherwood and C. P. Ellington, “The aerodynamics of revolving wings I. Model hawkmoth wings,” J. Exp. Biol., Vol.205, pp. 1547-1564, 2002.
- [10] C. P. Ellington, “The aerodynamics of hovering insect flight. V. a vortex theory,” Phil. Trans. R. Soc. B, Vol.305, pp. 115-144, 1984.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.