Paper:
Multiple Rotors Hovering Near an Upper or a Side Wall
Yasutada Tanabe*1, Masahiko Sugiura*1, Takashi Aoyama*1, Hideaki Sugawara*2, Shigeru Sunada*3, Koichi Yonezawa*4, and Hiroshi Tokutake*5
*1Japan Aerospace Exploration Agency (JAXA)
6-13-1 Osawa, Mitaka, Tokyo 181-0015, Japan
*2Ryoyu Systems, Co., Ltd.
Ryoko South Bldg., 6-19 Oe-cho, Minato-ku, Nagoya-shi, Aichi 455-0024, Japan
*3Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan
*4Central Research Institute of Electric Power Industry (CRIEPI)
1646 Abiko, Abiko-shi, Chiba 270-1194, Japan
*5Kanazawa University
Kakuma-machi, Kanazawa, Ishikawa 920-1192, Japan

The influence of walls on the performance of multiple rotor type drones is numerically simulated. With the current wide-spread applications of autonomously flyable UAVs, there are potential needs to use the drones for inspections and observation near various structures, such as buildings and bridges. The flow fields around multiple rotors are influenced significantly by the existence of an upper or a side wall, so that the thrust, required torque, and other forces and moments are changed. It is found that when a rotor approaches an upper wall, as the distance between the rotor and the upper wall is less than a diameter of the rotor, the thrust suddenly increases, which causes the rotors to collide with the upper wall. When an isolated rotor is operated near a side wall, the thrust decreases and a rolling moment appears to tilt the rotor toward the wall as the distance becomes shorter. For a multiple rotor drone near a side wall, the rotors have different distances from the wall, which causes the whole aircraft tilts toward the wall. From the perspective of safety operations, the multi-rotor drone should be kept away from both the upper wall and the side wall at a distance of at least 1.5 times of the rotor diameter to prevent unexpected motions of the aircraft caused by the wall during hovering flight.
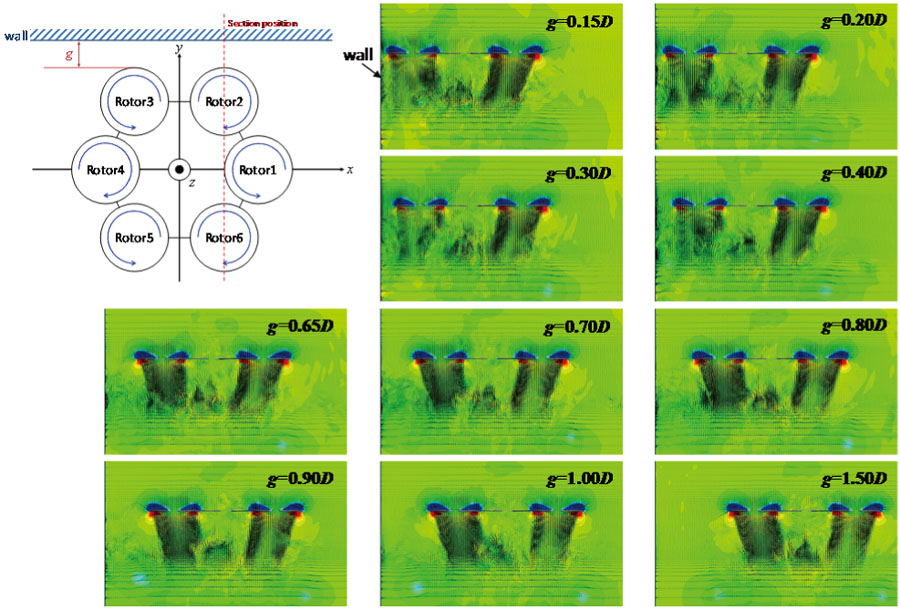
Flow fields of hexa-rotors near the side wall
- [1] Y. Tanabe, S. Saito, and H. Sugawara, “Construction and Validation of an Analysis Tool Chain for Rotorcraft Active Noise Reduction,” 38th ERF, Amsterdam, NL, Sept. 4-7, 2012.
- [2] Y. Tanabe, S. Saito, O. Takayama, D. Sasaki, and K. Nakahashi, “A New Hybrid Method of Overlapping Structured Grids Combined with Unstructured Fuselage Grids for Rotorcraft Analysis,” 36th European Rotorcraft Forum, Paris, France, September 9-11, 2010.
- [3] Y. Tanabe, T. Aoyama, M. Sugiura, H. Sugawara, S. Sunada, K. Yonezawa, and H. Tokutake, “Numerical Simulations of Aerodynamic Interactions Between Multiple Rotors,” 42nd European Rotorcraft Forum, Lille, France, Sept. 6-9, 2016.
- [4] E. Shima and K. Kitamura, “On New Simple Low-Dissipation Scheme of AUSM-Family for All Speeds,” 47th AIAA Aerospace Sciences Meeting, Orlando, FA, January 5-8, 2009, AIAA Paper 2009-136, 2009.
- [5] Y. Tanabe and S. Saito, “Significance of All-Speed Scheme in Application to Rotorcraft CFD Simulations,” The 3rd Int. Basic Research Conf. on Rotorcraft Technology, Nanjing, China, October 14-16, 2009.
- [6] S. Yamamoto and H. Daiguji, “Higher-Order-Accurate Upwind Schemes for Solving the Compressible Euler and Navier-Stokes Equations,” Computers & Fluids, Vol.22, No.2/3, pp. 259-270, 1993.
- [7] L. P. Zhang and Z. J. Wang, “A Block LU-SGS Implicit Dual Time-Stepping Algorithm for Hybrid Dynamic Meshes,” Computers & Fluids, Vol.33, pp. 891-916, 2004.
- [8] A. Arnone, M. S. Liou, and L. A. Povinelli, “Multigrid Time-Accurate Integration of Navier-Stokes Equations,” NASA TM-106373, November 1993.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.