Paper:
Development and Field Evaluation of a ROV-Based System for Moon Jellyfish Removal Operation
Jonghyun Ahn
 and Shoun Masuda
and Shoun Masuda
Hiroshima Institute of Technology
2-1-1 Miyake, Saeki-ku, Hiroshima, Hiroshima 731-5193, Japan

In recent years, the Seto Inland Sea has experienced extensive blooms of moon jellyfish (Aurelia aurita), resulting in substantial disruptions to the local fishing industry. Large aggregations of jellyfish clog fishing nets, damage gear, and reduce fish catches, causing significant economic losses for coastal communities. In 2023, unusually high jellyfish densities were recorded from April onward, and fishing operations in some areas were either severely curtailed or temporarily suspended due to the intensity of the blooms. Despite ongoing monitoring and localized mitigation efforts, no effective large-scale removal methods currently exist that can be rapidly and efficiently deployed under real marine conditions. To address this pressing issue, we developed a remotely operated vehicle (ROV) equipped with a custom-designed suction-and-shredding jellyfish removal device, capable of capturing and removing jellyfish in situ. The ROV was designed with a dry weight of less than 40 kg, enabling two operators to deploy and retrieve it without specialized lifting equipment. Field experiments conducted in the Seto Inland Sea demonstrated that, once a jellyfish was detected by the operator, removal typically required approximately 20 s. Additionally, the fragments collected after removal measured less than approximately 50 mm in diameter. According to previous studies on jellyfish regeneration, fragments of this size are incapable of regenerating. These field trials provided valuable insights into the ROV’s handling, effectiveness, and practical applicability. The results suggest that the proposed method has the potential to substantially reduce fishermen’s workload, mitigate economic losses, and contribute to sustainable marine resource management by providing a rapid and efficient response to large-scale jellyfish blooms.
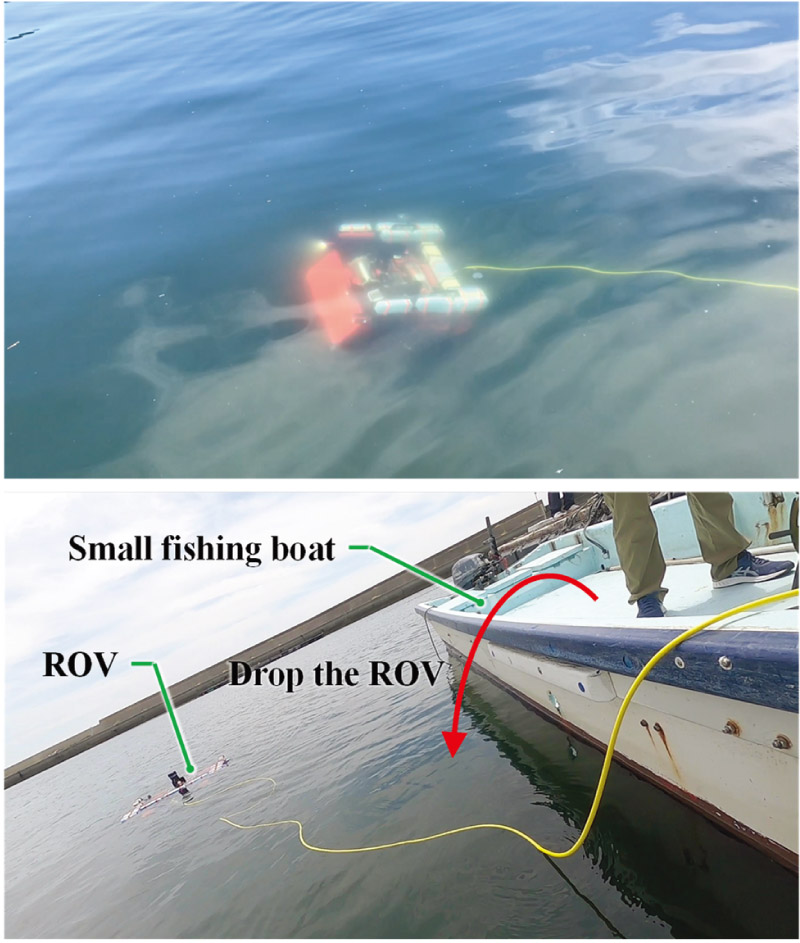
Field experiment of the deveolped jellyfish removal ROV
- [1] J. E. Purcell, S. Uye, and W.-T. Lo, “Anthropogenic causes of jellyfish blooms and their direct consequences for humans: A review,” Marine Ecology Progress Series, Vol.350, pp. 153-174, 2007. https://doi.org/10.3354/meps07093
- [2] C. H. Lucas, S. Gelcich, and S.-I. Uye, “Living with jellyfish: Management and adaptation strategies,” K. A. Pitt and C. H. Lucas (Eds.), “Jellyfish Blooms,” Springer, pp. 129-150, 2014. https://doi.org/10.1007/978-94-007-7015-7_6
- [3] Z. Dong, “Blooms of the moon jellyfish Aurelia: Causes, consequences and controls,” C. Sheppard (Ed.), “World Seas: An Environmental Evaluation (2nd ed.) – Vol.III: Ecological Issues and Environmental Impacts,” Academic Press, pp. 163-171, 2019. https://doi.org/10.1016/B978-0-12-805052-1.00008-5
- [4] R. Capocci, G. Dooly, E. Omerdić, J. Coleman, T. Newe, and D. Toal, “Inspection-class remotely operated vehicles—A review,” J. of Marine Science and Engineering, Vol.5, No.1, Article No.13, 2017. https://doi.org/10.3390/jmse5010013
- [5] D. R. Yoerger, M. Jakuba, A. M. Bradley, and B. Bingham, “Techniques for deep sea near bottom survey using an autonomous underwater vehicle,” Int. J. Robotics Res., Vol.26, No.1, pp. 41-54, 2007. https://doi.org/10.1177/0278364907073773
- [6] D. Sward, J. Monk, and P. Barrett, “A systematic review of remotely operated vehicle surveys for visually assessing fish assemblages,” Frontiers in Marine Science, Vol.6, Article No.134, 2019. https://doi.org/10.3389/fmars.2019.00134
- [7] J. Shoji, T. Kudoh, H. Takatsuji, O. Kawaguchi, and A. Kasai, “Distribution of moon jellyfish Aurelia aurita in relation to summer hypoxia in Hiroshima Bay, Seto Inland Sea,” Estuarine, Coastal and Shelf Science, Vol.86, No.4, pp. 485-490, 2010. https://doi.org/10.1016/j.ecss.2009.03.001
- [8] M. J. McHenry and J. Jed, “The ontogenetic scaling of hydrodynamics and swimming performance in jellyfish (Aurelia aurita),” J. of Experimental Biology, Vol.26, No.22, pp. 4125-4137, 2003. https://doi.org/10.1242/jeb.00649
- [9] S. Masuda, J. Ahn, and K. Ishii, “Development of a jellyfish removal device to equip on underwater robot and its suction performance evaluation,” OCEANS 2024 – Singapore, 2024. https://doi.org/10.1109/OCEANS51537.2024.10682331
- [10] H. Ishii and F. Tanaka, “Respiration rates and metabolic demands of Aurelia aurita in Tokyo Bay with special reference to large medusae,” Plankton and Benthos Research, Vol.1, No.1, pp. 64-67, 2006. https://doi.org/10.3800/pbr.1.64
- [11] E. A. Yoon et al., “Density estimates of moon jellyfish (Aurelia coerulea) in the Yeongsan estuary using nets and hydroacoustics,” Ocean Science J., Vol.54, No.3, pp. 457-465, 2019. https://doi.org/10.1007/s12601-019-0022-x
- [12] M. J. Abrams et al., “Self-repairing symmetry in jellyfish through mechanically driven reorganization,” Proc. of the National Academy of Sciences, Vol.112, No.26, pp. E3365-E3373, 2015. https://doi.org/10.1073/pnas.1502497112
- [13] C. Sinigaglia et al., “Pattern regulation in a regenerating jellyfish,” eLife, Vol.9, Article No.e54868, 2020. https://doi.org/10.7554/eLife.54868
- [14] M. Gong et al., “Jellyfish shape as a mechanical balance,” Proc. of the National Academy of Sciences, Vol.122, No.13, Article No.e2412082122, 2025. https://doi.org/10.1073/pnas.2412082122
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.