Paper:
Sensorless Collision-Detection Method Exploiting Static Redundancy for Robustness to Manipulation Forces
Kousuke Okabe*
 and Hideki Honda**
and Hideki Honda**
*National Institute of Technology, Wakayama College
77 Noshima, Nada-cho, Gobo, Wakayama 644-0023, Japan
**Graduate School of Life Science and Systems Engineering, Kyushu Institute of Technology
2-4 Hibikino, Wakamatsu-ku, Kitakyushu, Fukuoka 808-0196, Japan

In this paper, we propose a sensorless collision-detection method that exploits static redundancy and achieves robustness against unknown manipulation forces. The proposed method does not require additional sensors other than joint position or motor current sensors commonly used in industrial manipulators and collaborative robots. This method enables the detection of collisions at the terminal link under unknown manipulation force conditions that are difficult to detect using conventional methods. By extracting the null-space component of the Jacobian matrix from the joint driving torque, the method achieves low-latency detection with simple computation. Moreover, by limiting the task space in which the manipulation forces are applied according to the task, the proposed method can be applied to general-purpose manipulators. In this study, the effectiveness of the proposed method was validated through simulations using a planar 2-degree-of-freedom (2-DOF) manipulator and experiments using a vertical 6-DOF manipulator.
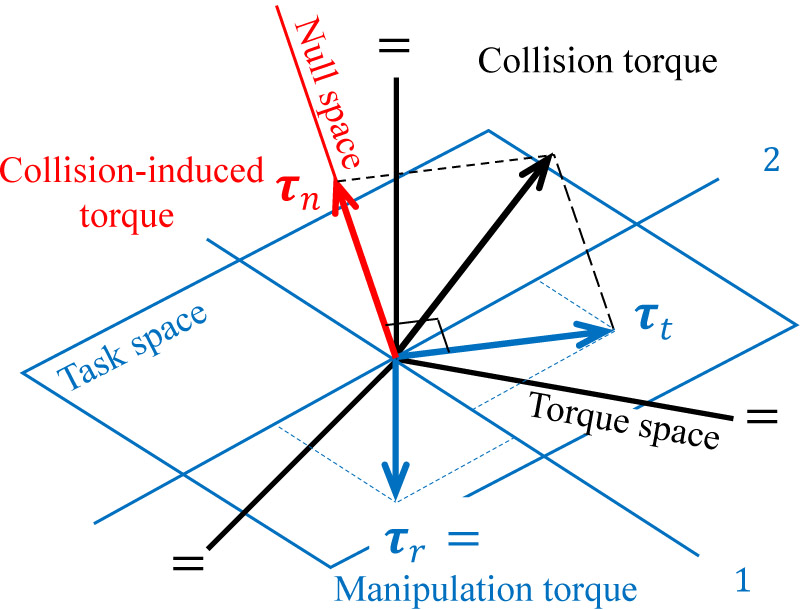
Distribution of torques in torque space
- [1] S. Haddadin, A. De Luca, and A. Albu-Schäffer, “Robot collisions: A survey on detection, isolation, and identification,” IEEE Trans. on Robotics, Vol.33, No.6, pp. 1292-1312, 2017. https://doi.org/10.1109/TRO.2017.2723903
- [2] S. Takakura, T. Murakami, and K. Ohnishi, “An approach to collision detection and recovery motion in industrial robot,” 15th Annual Conf. of IEEE Industrial Electronics Society, Vol.2, pp. 421-426, 1989. https://doi.org/10.1109/IECON.1989.69669
- [3] T. Murakami, S. Takakura, and K. Ohnishi, “Collision detection and recovery motion for industrial robot based on signal of disturbance observer,” IEEJ Trans. on Industry Applications, Vol.110, No.11, pp. 1155-1162, 1990 (in Japanese). https://doi.org/10.1541/ieejias.110.1155
- [4] K. Suita et al., “A failure-to-safety ‘Kyozon’ system with simple contact detection and stop capabilities for safe human-autonomous robot coexistence,” Proc. of 1995 IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 3089-3096, 1995. https://doi.org/10.1109/ROBOT.1995.525724
- [5] K. Kosuge, T. Matsumoto, and S. Morinaga, “Collision detection system for manipulator based on adaptive control scheme,” Trans. of the Society of Instrument and Control Engineers, Vol.39, No.6, pp. 552-558, 2003 (in Japanese). https://doi.org/10.9746/sicetr1965.39.552
- [6] S. Morinaga and K. Kosuge, “Collision detection system for manipulator based on adaptive impedance control law,” 2003 IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 1080-1085, 2003. https://doi.org/10.1109/ROBOT.2003.1241736
- [7] A. de Luca and R. Mattone, “Sensorless robot collision detection and hybrid force/motion control,” Proc. of the 2005 IEEE Int. Conf. on Robotics and Automation, pp. 999-1004, 2005. https://doi.org/10.1109/ROBOT.2005.1570247
- [8] A. De Luca, A. Albu-Schaffer, S. Haddadin, and G. Hirzinger, “Collision detection and safe reaction with the DLR-III lightweight manipulator arm,” 2006 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1623-1630, 2006. https://doi.org/10.1109/IROS.2006.282053
- [9] J. Xiao, Q. Zhang, Y. Hong, G. Wang, and F. Zeng, “Collision detection algorithm for collaborative robots considering joint friction,” Int. J. of Advanced Robotic Systems, Vol.15, No.4, 2018. https://doi.org/10.1177/1729881418788992
- [10] L. Han, W. Xu, B. Li, and P. Kang, “Collision detection and coordinated compliance control for a dual-arm robot without force/torque sensing based on momentum observer,” IEEE/ASME Trans. on Mechatronics, Vol.24, No.5, pp. 2261-2272, 2019. https://doi.org/10.1109/TMECH.2019.2934141
- [11] S. Huang, M. Gao, L. Liu, J. Chen, and J. Zhang, “Collision detection for cobots: A back-input compensation approach,” IEEE/ASME Trans. on Mechatronics, Vol.27, No.6, pp. 4951-4962, 2022. https://doi.org/10.1109/TMECH.2022.3169084
- [12] J. Bimbo, C. Pacchierotti, N. G. Tsagarakis, and D. Prattichizzo, “Collision detection and isolation on a robot using joint torque sensing,” 2019 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 7604-7609, 2019. https://doi.org/10.1109/IROS40897.2019.8967998
- [13] Z. Qiu, R. Ozawa, and S. Ma, “Adaptive virtual power-based collision detection and isolation with link parameter estimation,” Advanced Robotics, Vol.34, No.12, pp. 814-825, 2020. https://doi.org/10.1080/01691864.2020.1751707
- [14] Y. J. Heo et al., “Collision detection for industrial collaborative robots: A deep learning approach,” IEEE Robotics and Automation Letters, Vol.4, No.2, pp. 740-746, 2019. https://doi.org/10.1109/LRA.2019.2893400
- [15] K. M. Park, J. Kim, J. Park, and F. C. Park, “Learning-based real-time detection of robot collisions without joint torque sensors,” IEEE Robotics and Automation Letters, Vol.6, No.1, pp. 103-110, 2021. https://doi.org/10.1109/LRA.2020.3033269
- [16] K. M. Park, Y. Park, S. Yoon, and F. C. Park, “Collision detection for robot manipulators using unsupervised anomaly detection algorithms,” IEEE/ASME Trans. on Mechatronics, Vol.27, No.5, pp. 2841-2851, 2022. https://doi.org/10.1109/TMECH.2021.3119057
- [17] F. Min, G. Wang, and N. Liu, “Collision detection and identification on robot manipulators based on vibration analysis,” Sensors, Vol.19, No.5, Article No.1080, 2019. https://doi.org/10.3390/s19051080
- [18] K. Okabe, “Translating manipulating force polytope by dynamics on kinematical redundant manipulators,” J. of the Robotics Society of Japan, Vol.41, No.3, pp. 303-308, 2023. https://doi.org/10.7210/jrsj.41.303
- [19] C. Gaz, E. Magrini, and A. De Luca, “A model-based residual approach for human-robot collaboration during manual polishing operations,” Mechatronics, Vol.55, pp. 234-247, 2018. https://doi.org/10.1016/j.mechatronics.2018.02.014
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.