Development Report:
Analysis and Visualization of Growth Factors in Agricultural Data Using Explainable AI with L1/L2 Regularization
Haruki Hisatsune and Keiji Kamei
Department of Production Systems, Graduate School of Engineering, Nishinippon Institute of Technology
1-11 Aratsu, Kanda, Miyako, Fukuoka 800-0394, Japan

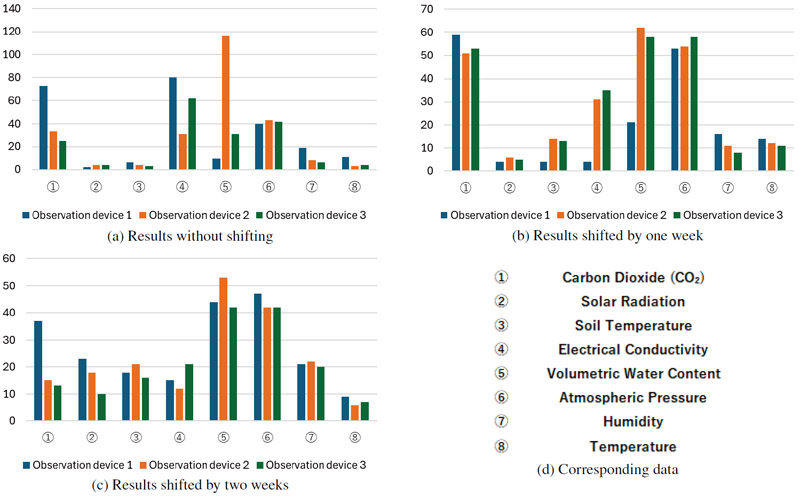
In this study, we propose a sparse recurrent neural network model with regularization to identify the environmental factors contributing to strawberry growth evaluation. The learning data consisted of eight environmental variables, including carbon dioxide concentration and solar radiation, measured by observation devices in a greenhouse. The target data included shipment volume, quality, growth status, and the farmer’s intuitive evaluation. Data obtained during three periods between February and March 2025 were used in this study. Model training was performed using backpropagation through time with the mean squared error as the loss function. To induce sparsity, L1 and L2 regularization were applied, suppressing moderately influential weights and yielding a more interpretable model structure. Unlike conventional black-box models that rely on post-hoc explanation techniques, the proposed method constructs an intrinsically interpretable learning model in which the influence of each environmental variable is directly reflected in the learned network structure. Rather than improving prediction accuracy, this study aimed to clarify the dominant environmental factors through a transparent and structurally constrained learning framework. The results suggested that growth evaluation was influenced by the carbon dioxide concentration around observation device 1, atmospheric pressure measured across multiple devices, and other environmental variables. These findings demonstrate that important environmental factors in strawberry cultivation can be effectively visualized, supporting transparent AI-based analysis and practical decision-making in agricultural production.
Visualization of quality-related factors using XAI
- [1] L. Droukas, Z. Doulgeri, N. L. Tsakiridis, D. Triantafyllou, I. Kleitsiotis, I. Mariolis, D. Giakoumis, D. Tzovaras, D. Kateris, and D. Bochtis, “A survey of robotic harvesting systems and enabling technologies,” J. of Intelligent & Robotic Systems, Vol.107, No.1, Article No.21, 2023. https://doi.org/10.1007/s10846-022-01793-z
- [2] Z. H. Wang, Y. Xun, Y. K. Wang, and Q. H. Yang, “Review of smart robots for fruit and vegetable picking in agriculture,” Int. J. of Agricultural and Biological Engineering, Vol.15, No.1, pp. 33-54, 2022. https://doi.org/10.25165/j.ijabe.20221501.7232
- [3] V. R. S. Rajendran, B. Debnath, S. Mghames, W. Mandil, S. Parsa, S. Parsons, and A. Ghalamzan-E, “Towards autonomous selective harvesting: A review of robot perception, robot design, motion planning and control,” J. of Field Robotics, Vol.41, No.7, pp. 2247-2279, 2023. https://doi.org/10.1002/rob.22230
- [4] M. K. A. Karkee and B. Adhikari, “Agricultural harvesting robot concept design and system components: A review,” Agronomy, Vol.5, No.2, Article No.48, 2024. https://doi.org/10.3390/agriengineering5020048
- [5] Y. Sugomori, “Deep learning explained in detail: Time series data processing with TensorFlow/Keras and PyTorch,” Mynavi Publishing, 2021 (in Japanese).
- [6] R. J. Williams and D. Zipser, “A learning algorithm for continually running fully recurrent neural networks,” Y. Chauvin and D. E. Rumelhart (Eds.), “Back-Propagation: Theory, Architectures and Applications,” Lawrence Erlbaum Associates, pp. 433-486, 1995.
- [7] M. Ishikawa, “Structured learning using forgetting in connectionist models,” IEICE Technical Report on Medical Electronics and Bio-Cybernetics (MEB88-144), pp. 143-148, 1988 (in Japanese).
- [8] M. Ishikawa, “Structural learning algorithm of connectionist model with forgetting,” J. of the Japanese Society for Artificial Intelligence, Vol.5, No.5, pp. 595-603, 1990 (in Japanese).
- [9] M. Ishikawa, “Structural learning with forgetting,” Neural Networks, Vol.9, No.3, pp. 509-521, 1996. https://doi.org/10.1016/0893-6080(96)83696-3
- [10] H. Hisatsune and K. Kamei, “Identification of growth factors in strawberries using sparse modeling AI,” Proc. of the 26th SOFT Kyushu Chapter Annual Conf., pp. 24-29, 2024 (in Japanese).
- [11] H. Hisatsune and K. Kamei, “Estimation of strawberry growth factors using sparse modeling AI,” Proc. of the 19th Int. Conf. on Innovative Computing, Information and Control (ICICIC 2025), p. 143, 2025.
- [12] M. Ishikawa, “Towards human-interpretable deep learning in stacked autoencoders,” IEICE Technical Report, pp. 99-104, 2019 (in Japanese).
- [13] A. Kamilaris and F. X. Prenafeta-Boldú, “Deep learning in agriculture: A survey,” Computers and Electronics in Agriculture, Vol.147, pp. 70-90, 2018. https://doi.org/10.1016/j.compag.2018.02.016
- [14] K. G. Liakos, P. Busato, D. Moshou, S. Pearson, and D. Bochtis, “Machine learning in agriculture: A review,” Sensors, Vol.18, No.8, Article No.2674, 2018. https://doi.org/10.3390/s18082674
- [15] A. Chlingaryan, S. Sukkarieh, and B. Whelan, “Machine learning approaches for crop yield prediction and nitrogen status estimation in precision agriculture: A review,” Computers and Electronics in Agriculture, Vol.151, pp. 61-69, 2018. https://doi.org/10.1016/j.compag.2018.05.012
- [16] T. Van Klompenburg, A. Kassahun, and C. Catal, “Crop yield prediction using machine learning: A systematic literature review,” Computers and Electronics in Agriculture, Vol.177, Article No.105709, 2020. https://doi.org/10.1016/j.compag.2020.105709
- [17] M. A. Jabed and M. A. A. Murad, “Crop yield prediction in agriculture: A comprehensive review,” Heliyon, Vol.10, No.24, Article No.e40836, 2024. https://doi.org/10.1016/j.heliyon.2024.e40836
- [18] S. P. Mohanty, D. P. Hughes, and M. Salathé, “Using deep learning for image-based plant disease detection,” Frontiers in Plant Science, Vol.7, Article No.1419, 2016. https://doi.org/10.3389/fpls.2016.01419
- [19] S. Sladojevic, M. Arsenovic, A. Anderla, D. Culibrk, and D. Stefanovic, “Deep neural networks based recognition of plant diseases,” Computational Intelligence and Neuroscience, Vol.2016, Article No.3289801, 2016. https://doi.org/10.1155/2016/3289801
- [20] T. Fujinaga, S. Yasukawa, and K. Ishii, “Tomato growth state map for the automation of monitoring and harvesting,” J. Robot. Mechatron., Vol.32, No.6, pp. 1279-1291, 2020. https://doi.org/10.20965/jrm.2020.p1279
- [21] K. Kase, N. Matsumoto, and T. Ogata, “Leveraging motor babbling for efficient robot learning,” J. Robot. Mechatron., Vol.33, No.5, pp. 1063-1074, 2021. https://doi.org/10.20965/jrm.2021.p1063
- [22] A. Bechar and C. Vigneault, “Agricultural robots for field operations: Concepts and components,” Biosystems Engineering, Vol.149, pp. 94-111, 2016. https://doi.org/10.1016/j.biosystemseng.2016.06.014
- [23] R. R. Shamshiri, D. Kalantari, K. C. Ting, J. R. Thorp, I. A. Hameed, and C. Weltzien, “Advances in greenhouse automation and controlled environment agriculture: A transition to plant factories and urban agriculture,” Int. J. of Agricultural and Biological Engineering, Vol.11, No.1, pp. 1-22, 2018. https://doi.org/10.25165/j.ijabe.20181101.3210
- [24] P. Filippi, B. M. Whelan, and T. F. A. Bishop, “Explainable machine learning to map the impact of weather and soil on wheat yield and revenue across the eastern Australian grain belt,” Agriculture, Vol.14, No.12, Article No.2318, 2024. https://doi.org/10.3390/agriculture14122318
- [25] K. Nagasubramanian, S. Jones, A. K. Singh, S. Sarkar, A. Singh, and B. Ganapathysubramanian, “Plant disease identification using explainable 3D deep learning on hyperspectral images,” Plant Methods, Vol.15, Article No.98, 2019. https://doi.org/10.1186/s13007-019-0479-8
- [26] S. M. Lundberg and S.-I. Lee, “A unified approach to interpreting model predictions,” Advances in Neural Information Processing Systems (NeurIPS), pp. 4765-4774, 2017.
- [27] M. T. Ribeiro, S. Singh, and C. Guestrin, “Why should I trust you?: Explaining the predictions of any classifier,” Proc. of the 22nd ACM SIGKDD Int. Conf. on Knowledge Discovery and Data Mining (KDD), pp. 1135-1144, 2016. https://doi.org/10.1145/2939672.2939778
- [28] C. Molnar, “Interpretable Machine Learning (2nd ed.),” Lulu Press, 2022.
- [29] F. Doshi-Velez and B. Kim, “Towards a rigorous science of interpretable machine learning,” arXiv:1702.08608, 2017. https://doi.org/10.48550/arXiv.1702.08608
- [30] Food and Agriculture Organization of the United Nations, “Employment indicators: Agriculture, forestry and fishing (2000–2023).” https://www.fao.org/statistics/highlights-archive/highlights-detail/employment-indicators-2000-2023-(july-2025-update)/ [Accessed January 20, 2026]
- [31] Ministry of Agriculture, Forestry and Fisheries, “Statistics on agricultural labor force.” https://www.maff.go.jp/j/tokei/sihyo/data/08.html [Accessed September 25, 2025]
- [32] Ministry of Agriculture, Forestry and Fisheries, “Preparation and start-up support funds for new farmers.” https://www.maff.go.jp/j/new_farmer/n_syunou/roudou.html [Accessed September 25, 2025]
- [33] Grand View Research, “Harvesting robots market size, Share & Trends analysis report.” https://www.grandviewresearch.com/industry-analysis/harvesting-robots-market-report [Accessed January 28, 2026]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.