Development Report:
Development of an Electro-Hydrostatic Actuator CADUCEUS and an Actuator-Equipped Rotary Mechanism
Kwanwai Mak*
 and Koichi Osuka**
and Koichi Osuka**
*Komatsu MIRAI Construction Equipment Cooperative Research Center, Graduate School of Engineering, Osaka University
Central Terrace 5F, 2-1 Yamadaoka, Suita, Osaka 565-0871, Japan
**Graduate School of Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

An actuator for achieving the same force in both directions, and a mechanism for supporting rotary motion with the actuator are proposed. By fabricating models and performing tests, the action of the actuator mechanism, and its application on an excavator was demonstrated. Simulations on the arm-moving task performed on a conventional excavator and an excavator with the actuator mechanism show an efficiency improvement with the use of the proposed actuator mechanism, particularly when the arm is driven at low speed.
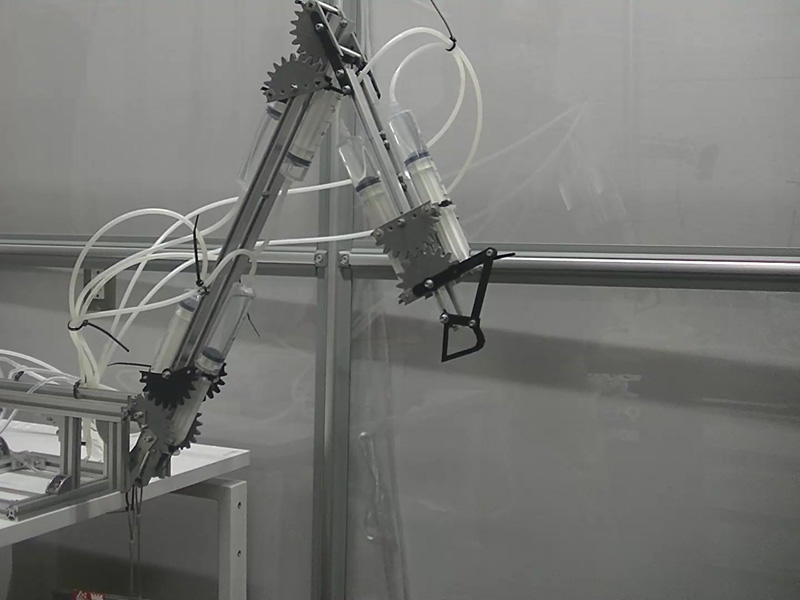
A model with proposed rotary mechanisms
- [1] G. C. Burdea, “Force and Touch Feedback for Virtual Reality,” John Wiley & Sons, 1996.
- [2] H. Kaminaga, S. Otuski, and Y. Nakamura, “Development of high-power and backdrivable linear electro-hydrostatic actuator,” 2014 IEEE-RAS Int. Conf. on Humanoid Robots, pp. 973-978, 2014. https://doi.org/10.1109/HUMANOIDS.2014.7041481
- [3] H. T. Phan, S. Itagaki, and Y. Sato, “Development of Hydraulic Pump Drive System Using Switched Reluctance Motor with Servo Function,” J. Robot. Mechatron., Vol.32, No.5, pp. 984-993, 2020. https://doi.org/10.20965/jrm.2020.p0984
- [4] M. Kumar, “A survey on electro hydrostatic actuators: Architecture and way ahead,” Materials Today: Proc., Vol.45, pp. 6057-6063, 2021. https://doi.org/10.1016/j.matpr.2020.10.049
- [5] T. A. Minav, P. Sainio, and M. Pietola, “Direct-driven hydraulic drive without conventional oil tank,” Proc. of the ASME/BATH 2014 Symp. on Fluid Power and Motion Control, 2014. https://doi.org/10.1115/FPMC2014-7834
- [6] T. Wiens, “An efficient, compact and low-cost Dual Cylinder Hydrostatic Actuator (DCHA),” Int. J. of Fluid Power, Vol.19, No.2, pp. 80-90, 2018. https://doi.org/10.1080/14399776.2018.1437321
- [7] E. V. Duganova, N. A. Zagorodniy, D. N. Solodovnikov, and A. S. Korneyev, “Studying quick coupler efficiency in working attachment system of single-bucket power shovel,” IOP Conf. Series: Materials Science and Engineering, Vol.327, No.4, Article No.042026, 2018. https://doi.org/10.1088/1757-899X/327/4/042026
- [8] R. Wilson, “The caduceus and its symbolism,” Annals of Medical History, Vol.4, No.3, pp. 301-303, 1922.
- [9] M. Komagata, T. Ko, K. Yamamoto, and Y. Nakamura, “Experimental Study on Critical Design of Electro-Hydrostatic Actuators Small in Size and Light in Weight,” J. Robot. Mechatron., Vol.32, No.5, pp. 911-922, 2020. https://doi.org/10.20965/jrm.2020.p0911
- [10] G. K. Costa and N. Sepehri, “Hydrostatic Transmissions and Actuators: Operation, Modelling and Applications,” John Wiley & Sons, 2015.
- [11] K. Ganchev, “Inverted slider-crank mechanism driven by hydraulic cylinder: transfer functions and approximations,” Engineering Mathematics, Vol.6, No.1, pp. 1-5, 2022.
- [12] D. Hagen, D. Padovani, and M. K. Ebbesen, “Study of a Self-Contained Electro-Hydraulic Cylinder Drive,” 2018 Global Fluid Power Society PhD Symp. (GFPS), pp. 1-7, 2018. https://doi.org/10.1109/GFPS.2018.8472360
- [13] K. Osuka, T. Kimura, and T. Ono, “H/sup infinity/control of a certain nonlinear actuator,” 29th IEEE Conf. on Decision and Control, pp. 370-371, 1990. https://doi.org/10.1109/CDC.1990.203616
- [14] T. Kosaki, Y. Kawahara, and S. Li, “A sliding mode controller using an LS-SVM model for a water-hydraulic artificial rubber muscle,” J. Robot. Mechatron., Vol.32, No.5, pp. 903-910, 2020. https://doi.org/10.20965/jrm.2020.p0903
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.