Paper:
Development of a Soft Robot with Locomotion Mechanism and Physical Reservoir Computing for Mimicking Gastropods
Yoshimune Tayama, Hidemitsu Furukawa
 , and Jun Ogawa
, and Jun Ogawa
Graduate School of Science and Technology, Yamagata University
4-3-16 Jonan, Yonezawa, Yamagata 992-8510, Japan

The class Gastropods, which includes snails and sea slugs, inhabits a wide range of environments. Members of this class move by utilizing waves generated through muscular contractions in their soft body tissues (pedal wave). This characteristic is observed in both aquatic and terrestrial species and serves as a mechanism for adapting to various environments. In this study, we developed a soft robot that generates pedal wave using soft matter. This soft robot employs sensing based on machine learning, utilizing the soft material as a physical reservoir to leverage its environmental adaptability and soft exterior. The experiments investigated in this study were the relationship between locomotion performance and environments and the identification accuracy achieved through machine learning.
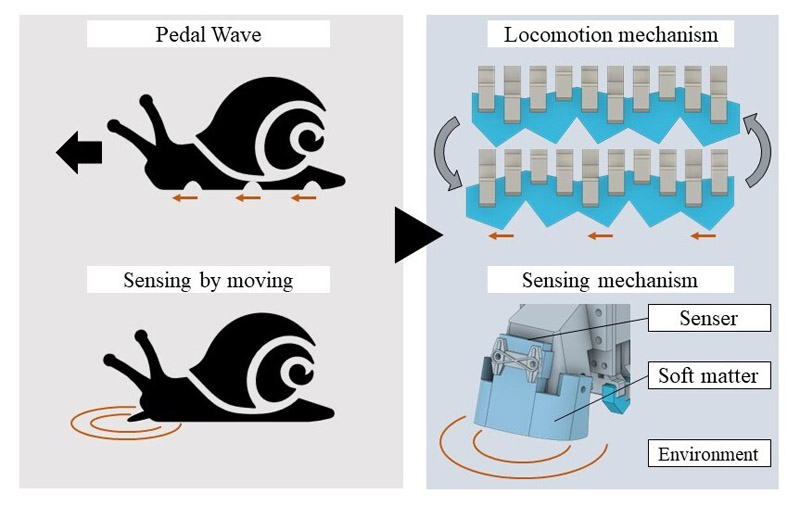
Overview of “Geltropods”
- [1] Z.-L. Yu, M.-J. Yang, H. Song, T. Zhang, and X.-T. Yuan, “Gastropod chemoreception behaviors—Mechanisms underlying the perception and location of targets and implications for shellfish fishery development in aquatic environments,” Frontiers in Marine Science, 2017. Vol.9, Article No.1042962, 2023. https://doi.org/10.3389/fmars.2022.1042962
- [2] K. M. Brown and C. Lydeard, “Mollusca: Gastropoda,” J. H. Thorp and A. P. Covich (Eds.), “Ecology and classification of North American freshwater invertebrates,” pp. 277-306, Academic Press, 2010. https://doi.org/10.1016/B978-0-12-374855-3.00010-8
- [3] J. Lai et al., “The mechanics of the adhesive locomotion of terrestrial gastropods,” J. of Experimental Biology, Vol.213, No.22, pp. 3920-3933, 2010. https://doi.org/10.1242/jeb.046706
- [4] S. Kuroda et al., “Common mechanics of mode switching in locomotion of limbless and legged animals,” J. of the Royal Society Interface, Vol.11, No.95, Article No.20140205, 2014. https://doi.org/10.1098/rsif.2014.0205
- [5] G. A. Pavlova, “The similarity of crawling mechanisms in aquatic and terrestrial gastropods,” J. of Comparative Physiology A, Vol.205, pp. 1-11, 2019. https://doi.org/10.1007/s00359-018-1294-9
- [6] M. Iwamoto, D. Ueyama, and R. Kobayashi, “The advantage of mucus for adhesive locomotion in gastropods,” J. of Theoretical Biology, Vol.353, pp. 133-141, 2014. https://doi.org/10.1016/j.jtbi.2014.02.024
- [7] W. Xin, F. T. Pan, Y. Li, P. W. Y. Chiu, and Z. Li, “Design and Modeling of a Biomimetic Gastropod-like Soft Robot with Wet Adhesive Locomotion,” 2021 IEEE Int. Conf. on Robotics and Automation, pp. 11997-12003, 2021. https://doi.org/10.1109/ICRA48506.2021.95607
- [8] A. M. Smith and A. M. Morin, “Biochemical Differences Between Trail Mucus and Adhesive Mucus From Marsh Periwinkle Snails,” Biological Bulletin, Vol.203, No.3, pp. 338-346, 2003. https://doi.org/10.2307/1543576
- [9] Z. Zhang et al., “Design and modeling of a parallel-pipe-crawling pneumatic soft robot,” IEEE Access, Vol.7, pp. 134301-134317, 2019. https://10.1109/ACCESS.2019.2941502
- [10] R. Pfeifer, M. Lungarella, and F. Iida, “The challenges ahead for bio-inspired ‘soft’ robotics,” Communications of the ACM, Vol.55, No.11, pp. 76-87, 2012. https://doi.org/10.1145/2366316.2366335
- [11] D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, Vol.521, pp. 467-475, 2015. https://doi.org/10.1038/nature14543
- [12] I. Sudo et al., “Local Discrimination Based on Piezoelectric Sensing in Robots Composed of Soft Matter with Different Physical Properties,” J. Robot. Mechatron., Vol.34, No.2, pp. 339-350, 2022. https://doi.org/10.20965/jrm.2022.p0339
- [13] M. V. Ottermo, M. Ovstedal, T. Langø, O. Stavdahl, Y. Yavuz, T. A. Johansen, and R. Mårvik, “The role of tactile feedback in laparoscopic surgery,” Surgical Laparoscopy, Endoscopy & Percutaneous Techniques, Vol.16, No.6, pp. 390-400, 2006. https://doi.org/10.1097/01.sle.0000213734.87956.24
- [14] C. Caremel, M. Ishige, T. Ta, and Y. Kawahara, “Echo State Network for Soft Actuator Control,” J. Robot. Mechatron., Vol.34, No.2, pp. 413-421, 2022. https://doi.org/10.20965/jrm.2022.p0413
- [15] R. Sakurai, M. Nishida, T. Jo, Y. Wakao, and K. Nakajima, “Durable Pneumatic Artificial Muscles with Electric Conductivity for Reliable Physical Reservoir Computing,” J. Robot. Mechatron., Vol.34, No.2, pp. 240-248, 2022. https://doi.org/10.20965/jrm.2022.p0240
- [16] M. Christ, N. Braun, J. Neuffer, and A. W. Kempa-Liehr, “Time series feature extraction on basis of scalable hypothesis tests (tsfresh – a python package),” Neurocomputing, Vol.307, pp. 72-77, 2018. https://doi.org/10.1016/j.neucom.2018.03.067
- [17] F. Pedregosa et al., “Scikit-learn: Machine Learning in Python,” J. of Machine Learning Research, Vol.12, pp. 2825-2830, 2011.
- [18] A. Guerrero Campos, “Analysis of the motion of soft animals (Gastropods),” B.S. Thesis, Universidad Carlos III de Madrid, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.