Paper:
Bow Force-Adjusting System by Artificial Hand with Inflatable Mechanism
Koji Shibuya*
 and Daiki Nishida**
and Daiki Nishida**
*Faculty of Advanced Science and Technology, Ryukoku University
1-5 Yokotani, Seta-oe cho, Otsu, Shiga 520-2194, Japan
**Graduate School of Science and Technology, Ryukoku University
1-5 Yokotani, Seta-oe cho, Otsu, Shiga 520-2194, Japan

The goal of this research was to design an artificial hand and bow force-adjusting system for playing the violin and to validate its effectiveness. The hand had five solid fingers without rotary joints. Instead, a chamber covered with a silicone rubber membrane was placed in each finger, except for the thumb. When the air pressure in the chamber is increased using an electric pneumatic regulator, the membrane inflates, which increases the force required to push the bow stick. We fabricated a hand and installed it on our 7-degrees-of-freedom manipulator. We conducted preliminary experiments to obtain the basic characteristics of the hand and built a bow force-adjusting system. We performed an experiment to confirm that the bow force could be adjusted by increasing or decreasing the air pressure in the index and little fingers. Thus, the bow force was successfully adjusted to the target using the artificial hand.
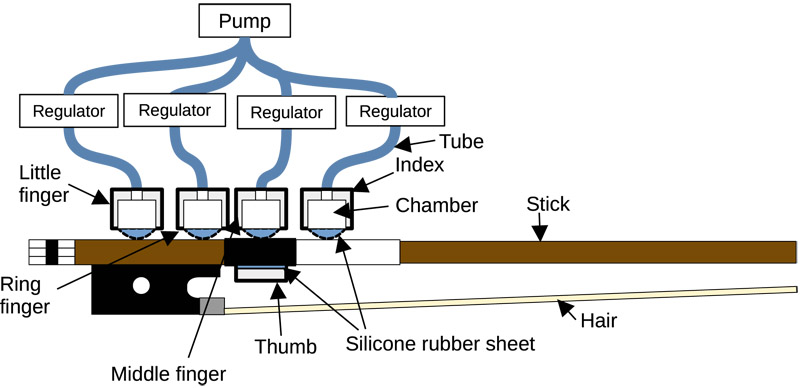
Schematics of proposed hand for bowing
- [1] M. Kajitani, “Development of Musician Robots,” J. Robot. Mechatron., Vol.1, No.3, pp. 254-255, 1989. https://doi.org/10.20965/jrm.1989.p0254
- [2] J. Solis and K. Ng (Eds.), “Musical robots and interactive, multimodal systems,” Springer-Verlag Berlin Heidelberg, 2011. https://doi.org/10.1007/978-3-642-22291-7
- [3] M. Bretan and G. Weinberg, “A survey of robotic musicianship,” Communications of the ACM, Vol.56, No.5, pp. 100-109, 2019. https://doi.org/10.1145/2818994
- [4] G. Weinberg, M. Bretan, G. Hoffman, and S. Driscoll, “Robotic musicianship,” Springer Nature Switzerland, Springer, 2020. https://doi.org/10.1007/978-3-030-38930-7
- [5] J. Y. Lin, M. Kawai, Y. Nishio, S. Cosentino, and A. Takanishi, “Development of performance system with musical dynamics expression on humanoid saxophonist robot,” IEEE Robotics and Automation Letters, Vol.4, No.2, pp. 1684-1690, 2019. https://doi.org/10.1109/LRA.2019.2897372
- [6] J. A. E. Hughes, P, Maiolino, and F. Iida, “An anthropomorphic soft skeleton hand exploiting conditional models for piano playing,” Science Robotics, Vol.3, Article No.eaau3098, 2018. https://doi.org/10.1126/scirobotics.aau3098
- [7] Y. Kusuda, “Toyota’s violin-playing robot,” Industrial Robot, Vol.35, No.6, pp. 504-506, 2008. https://doi.org/10.1108/01439910810909493
- [8] B.-C. Min, E. T. Matson, J. An, and D. Kim, “Improvement of violinist robot using a passive damper device,” J. of Intelligent Robot Systems, Vol.72, pp. 343-355, 2013. https://doi.org/10.1007/s10846-012-9799-x
- [9] T. Kamatani, Y. Sato, and M. Fujino, “Ghost play—A violin-playing robot using electromagnetic linear actuators,” Int. Conf. on New Interfaces for Musical Expression, 2020.
- [10] K. Shibuya and S. Sugano, “A strategy for the finger-arm coordinated motion analysis of human motion in violin playing,” ROMANSY 11 Theory and Practice of Robots and Manipulators (Proc. of the Eleventh CISM-IFToMM Symp.), Springer-Verlag, pp. 259-266, 1997. https://doi.org/10.1007/978-3-7091-2666-0_30
- [11] K. Shibuya, S. Matsuda, and A. Takahara, “Toward Developing a Violin Playing Robot—Bowing by Anthropomorphic Robot Arm and Sound Analysis—” Proc. of 16th IEEE Int. Symp. on Robot and Human Interactive Communication (RO-MAN 2007, Jeju Island, Korea), pp. 763-768, 2007. https://doi.org/10.1109/ROMAN.2007.4415188
- [12] D. Sakaki, T. Noritsugu, and M. Takaiwa, “Development of Pneumatic Soft Robot Hand for Human Friendly Robot,” J. Robot. Mechatron., Vol.15, No.2, pp. 164-171, 2003. https://doi.org/10.20965/jrm.2003.p0164
- [13] H. Park and D. Kim, “An open-source anthropomorphic robot hand system: HRI hand,” Hardware X, Vol.7, e00100, 2020. https://doi.org/10.1016/j.ohx.2020.e00100
- [14] K. Mizushima, T. Oku, Y. Suzuki, T. Tsuji, and T. Watanabe, “Multi-fingered robotic hand based on hybrid mechanism of tendon-driven and jamming transition,” Proc. of the IEEE Int. Conf. Soft Robotics (RoboSoft), pp. 24-28, 2018. https://doi.org/10.1109/ROBOSOFT.2018.8404948
- [15] S. Puhlmann, J. Harris, and O. Brock, “RBO hand 3: A platform for soft dexterous manipulation,” IEEE Trans. Robotics, Vol.38, No.6, pp. 3434-3449, 2022. https://doi.org/10.1109/TRO.2022.3156806
- [16] G. Endo, K. Yamagishi, Y. Yamanaka, and K. Tadakuma, “Development of High-Durability Flexible Fabrics Using High-Strength Synthetic Fibers and its Application to Soft Robots,” J. Robot. Mechatron., Vol.34, No.2, pp. 266-269, 2022. https://doi.org/10.20965/jrm.2022.p0266
- [17] K. Shibuya and D. Nishida, “Design of violinist robot’s right hand for bow hold with inflatable soft mechanism,” 19th Int. Conf. Ubiquitous Robots (UR), pp. 88-93, 2022. https://doi.org/10.1109/UR55393.2022.9826267
- [18] M. Demoucron, A. Askenfelt, and R. Causse, “Measuring bow force in bowed string performance, Theory and implementation of a bow force sensor,” Acta Acustica united with Acustica, Vol.95, No.4, pp. 718-732, 2009. https://doi.org/10.3813/AAA.918200
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.