Paper:
Fan-Shaped Pneumatic Soft Actuator that Can Operate Bending Motion for Ankle-Joint Rehabilitation Device
So Shimooka*1
 , Hirosato Yokoya*2, Masanori Hamada*3
, Shun Shiomi*3, Takenori Uehara*4
, Takahiro Hirayama*5
, and Tetsushi Kamegawa*1
, Hirosato Yokoya*2, Masanori Hamada*3
, Shun Shiomi*3, Takenori Uehara*4
, Takahiro Hirayama*5
, and Tetsushi Kamegawa*1
*1Faculty of Environmental, Life, Natural Science and Technology, Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama 700-8530, Japan
*2Graduate School of Interdisciplinary Science and Engineering in Health Systems, Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama 700-8530, Japan
*3Department of Rehabilitation Medicine, Okayama University Hospital
2-5-1 Shikata-cho, Okayama 700-8558, Japan
*4Department of Orthopaedic Surgery, NHO Okayama Medical Center
1711-1 Tamasu, Kita-ku, Okayama 701-1192, Japan
*5Department of Emergency, Critical Care and Disaster Medicine, Graduate School of Medicine, Dentistry and Pharmaceutical Sciences, Okayama University
2-5-1 Shikata-cho, Kita-ku, Okayama 700-8558, Japan

Nowadays, owing to declining birthrates and an aging population, patients and the elderly requiring rehabilitation are not getting enough physical activity. In addressing this issue, devices for rehabilitating them have been researched and developed. However, rehabilitation devices are almost exclusively used for patients who can get up, rather than those who are bedridden. In this study, we aim to develop a rehabilitation device that can provide passive exercise for bedridden patients. The ankle joint was selected as the target joint because the patients who have undergone surgery for cerebrovascular disease remain bedridden, and early recovery in the acute stage is highly desirable. We proposed and tested a fan-shaped pneumatic soft actuator (FPSA) that can expand and bend stably at angles when supply pressure is applied as an actuator for a rehabilitation device to encourage patient exercise. However, the previous FPSA’s movement deviates from the arch of the foot owing to increased supply pressure. In the ideal case, FPSA should push the arch of the foot in an arc motion. This study proposes and tests the FPSA that can operate a bending motion to provide passive exercise to the ankle joint using tensile springs and a winding mechanism powered by a servo motor. The proposed FPSA has a significant advantage of exhibiting no hysteresis in its pressure-displacement characteristics. The configuration and static analytical model of the improved FPSA are described.
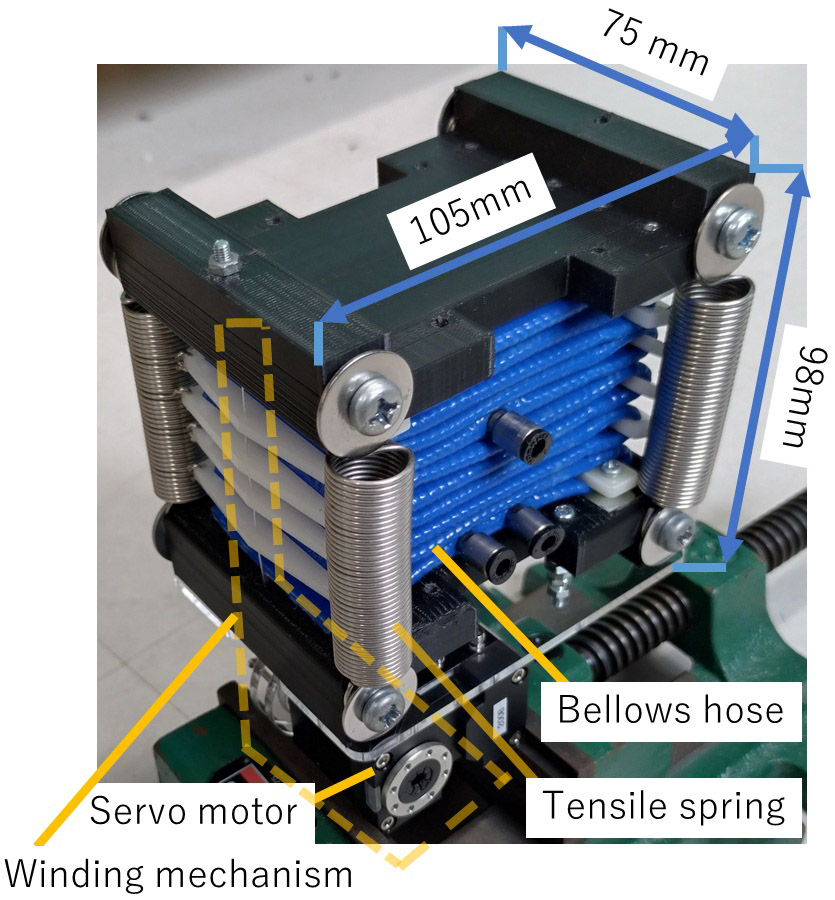
Soft actuator that can operate bending motion
- [1] N. Saga, “Development of an ankle CPM trainer for prevent contracture using the pneumatic balloon actuator,” IFAC Proc. Volumes, Vol.43, No.13, pp. 334-338, 2010. https://doi.org/10.3182/20100831-4-FR-2021.00059
- [2] Y. M. Khalid, D. Gouwanda, and S. Parasuraman, “A review on the mechanical design elements of ankle rehabilitation robot,” Proc. of the Institution of Mechanical Engineers Part H: J. of Engineering in Medicine, Vol.229, No.6, pp. 452-463, 2015. https://doi.org/10.1177/0954411915585597
- [3] C. Vér, G. Hofgárt, L. Menyhárt, L. Kardos, and L. Csiba, “Ankle-foot continuous passive motion device for mobilization of acute stroke patients,” Open J. of Therapy and Rehabilitation, Vol.3, pp. 24-34, 2015. http://doi.org/10.4236/ojtr.2015.32004
- [4] Y. Shimizu, H. Kamada, M. Sakane, S. Aikawa, H. Mutsuzaki, K. Tanaka, H. Mishima, A. Kanamori, T. Nishino, N. Ochiai, and M. Yamazaki, “A novel exercise device for venous thromboembolism prophylaxis improves venous flow in bed versus ankle movement exercises in healthy volunteers,” J. of Orthopaedic Surgery, Vol.25, No.3, Article No.2309499017739477, 2017. https://doi.org/10.1177/2309499017739477
- [5] P. Jamwal, S. Hussain, Y. Tsoi, and S. Xie, “Musculoskeletal model for path generation and modification of an ankle rehabilitation robot,” IEEE Trans. on Human-Machine Systems, Vol.50, No.5, pp. 373-383, 2020. https://doi.org/10.1109/THMS.2020.2989688
- [6] M. Dong, Y. Zhou, J. Li, X. Rong, W. Fan, X. Zhou, and Y. Kong, “State of the art in parallel ankle rehabilitation robot: A systematic review,” J. of NeuroEngineering and Rehabilitation, Vol.18, Article No.52, 2021. https://doi.org/10.1186/s12984-021-00845-z
- [7] D. M. Duc, P. D. Phuoc, and T. X. Tuy, “Research control for ankle joint rehabilitation device,” J. of Mechanical Engineering and Sciences, Vol.16, No.1, pp. 8743-8753, 2022. https://doi.org/10.15282/jmes.16.1.2022.08.0691
- [8] H. Okamoto and H. Taniguchi, “Development of pneumatic exercise device for the range of motion in the ankle joint,” 2022 IEEE/SICE Int. Symp. on System Integration (SII), pp. 585-589, 2022. https://doi.org/10.1109/SII52469.2022.9708828
- [9] T. Wang, E. Spyrakos-Papastavridis, and J. S. Dai, “Design and analysis of a novel reconfigurable ankle rehabilitation exoskeleton capable of matching the mobile biological joint center in real-time,” J. of Mechanisms and Robotics, Vol.15, Article No.011011, 2022. https://doi.org/10.1115/1.4054313
- [10] M. Tagami, M. Hasegawa, W. Tanahara, and Y. Tagawa, “Prototype of a continuous passive motion device for the knee joint with a function of active exercise,” J. Robot. Mechatron., Vol.34, No.1, pp. 767-776, 2022. https://doi.org/10.20965/jrm.2022.p0028
- [11] G. P. Marconi, A. A. Gopalai, and S. Chauhan, “A hybrid ankle-foot orthosis with soft pneumatic actuation,” Mechatronics, Vol.99, Article No.103171, 2024. https://doi.org/10.1016/j.mechatronics.2024.103171
- [12] S. Shimooka, R. Suzuki, T. Uehara, S. Shiomi, and T. Hirayama, “Design of ankle rehabilitation device using fan-shaped pneumatic soft actuator,” Proc. of 2024 The 7th Jc-IFToMM Int. Symp., Vol.7, pp. 43-49, 2024. https://doi.org/10.57272/jciftomm.7.0_43
- [13] S. Shimooka, R. Suzuki, T. Uehara, T. Hirayama, and A. Gofuku, “Development of ankle-joint rehabilitation device for bedridden patient using fan-shaped pneumatic soft actuator driven at low pressure,” J. Robot. Mechatron., Vol.35, No.3, pp. 565-576, 2023. https://doi.org/10.20965/jrm.2023.p0565
- [14] K. Suzumori, “New robotics pioneered by fluid power,” J. Robot. Mechatron., Vol.32, No.5, pp. 854-862, 2020. https://doi.org/10.20965/jrm.2020.p0854
- [15] M. Pan, C. Yuan, X. Liang, T. Dong, T. Liu, J. Zhang, J. Zou, H. Yang, and C. Bowen, “Soft actuators and robotic devices for rehabilitation and assistance,” Advanced Intelligent Systems, Vol.4, No.4, Article No.2100140, 2022. https://doi.org/10.1002/aisy.202100140
- [16] M. Li, A. Pal, A. Aghakhani, A. Pena-Francesch, and M. Sitti, “Soft actuators for real-world applications,” Nature Reviews Materials, Vol.7, pp. 235-249, 2022. https://doi.org/10.1038/s41578-021-00389-7
- [17] H.-J. Kim, A. Kawamura, Y. Nishioka, and S. Kawamura, “Mechanical design and control of inflatable robotic arms for high positioning accuracy,” Advanced Robotics, Vol.32, No.2, pp. 89-104, 2017. https://doi.org/10.1080/01691864.2017.1405845
- [18] M. Kouchi, M. Mochimaru, H. Iwasawa, and S. Mitani, “Anthropometric database for Japanese population 1997–98,” Japanese Industrial Standards Center (AIST, MITI), 2000 (in Japanese).
- [19] S. Shimooka, M. Kawanaka, and A. Gofuku, “A soft rotary actuator with a flexible shaft using flexible pneumatic actuators,” Sensors and Actuators A: Physical, Vol.361, Article No.114603, 2023. https://doi.org/10.1016/j.sna.2023.114603
- [20] B. Tondu, “Modelling of the McKibben artificial muscle: A review,” J. of Intelligent Material Systems and Structures, Vol.23, No.3, pp. 225-253, 2012. https://doi.org/10.1177/1045389X11435435
- [21] C.-J. Lin, C.-R. Lin, S.-K. Yu, and C.-T. Chen, “Hysteresis modeling and tracking control for a dual pneumatic artificial muscle system using Prandtl–Ishlinskii model,” Mechatronics, Vol.28, pp. 35-45, 2015. https://doi.org/10.1016/j.mechatronics.2015.03.006
- [22] R. Sakurai, M. Nishida, T. Jo, Y. Wakao, and K. Nakajima, “Durable pneumatic artificial muscles with electric conductivity for reliable physical reservoir computing,” J. Robot. Mechatron., Vol.34, No.2, pp. 240-248, 2022. https://doi.org/10.20965/jrm.2022.p0240
- [23] D. Zhou, Y. Liu, J. Deng, W. Chen, J. Sun, and Y. Fu, “Designing and modeling of tightly wrapped twisted artificial muscles with large stroke and low hysteresis,” IEEE Trans. on Industrial Electronics, Vol.69, No.10, pp. 10374-10384, 2022. https://doi.org/10.1109/TIE.2022.3159966
- [24] K. Fukushima, T. Miyazaki, T. Kawase, T. Kanno, M. Sogabe, Y. Nakajima, and K. Kawashima, “A pneumatic rotary actuator for forceps tip rotation,” Sensors and Actuators A: Physical, Vol.333, Article No.113222, 2022. https://doi.org/10.1016/j.sna.2021.113222
- [25] C. Ochiai and T. Inagawa, “Rehabilitation Visual Book,” Gakken Medical Shujunsha, p. 279, 2016 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.