Paper:
Development of Flexible Pneumatic Spherical Actuator for Giving Passive Exercise with Simplification of its Attitude Control System and Simple Analysis for Evaluation
Yuma Adachi, Yuto Harada, Tetsuya Akagi, Shujiro Dohta, Feifei Cho, Takashi Shinohara, and Masashi Yokota
Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan

With aging society, pneumatic soft actuators with human friendly features such as welfare support and virtual reality have been developed. In a previous study, a flexible pneumatic spherical actuator (FPSA) that could allow individuals to exercise passively while holding on to the top end of the actuator during motion was proposed. The actuator’s ability to improve the range of joints after surgery was tested. The FPSA comprises three extension-type flexible pneumatic actuators (EFPAs), shaped like a rugby ball through restraint by PET sheets. This paper introduces a non-contact bending/extension sensor composed of a Hall sensor and a ring-shaped magnet, proposed and tested as an attitude sensor. Recognizing that the FPSA’s bending direction depends on the pressurized EFPA, a simple measurement system was also proposed and tested. This system measures the bending angle and extensional displacement by measuring the displacement of the restraint plate at the center bottom of the FPSA. To simplify the attitude control system, a design reducing the number of valves from six to four was developed and tested. Results confirmed that the FPSA, equipped with this control system, could trace the desired bending angle even when the bending directional angle changed. Additionally, an analytical model was proposed to evaluate the effectiveness of passive exercise enabled by the spherical actuator. This model calculates the FPSA’s shape for various input pressures to the three EFPAs in open-loop attitude control. Results showed that the calculated attitude closely matched the actual actuator’s behavior.
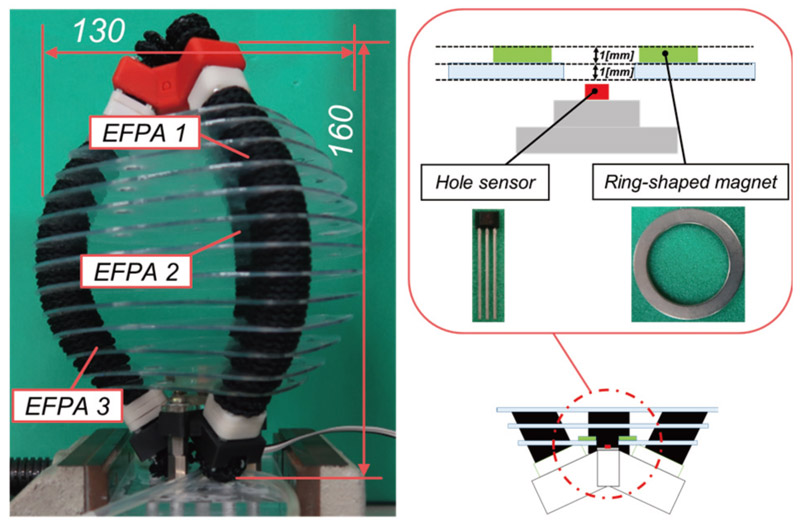
Flexible Pneumatic Spherical Actuator (FPSA) with magnetic displacement sensor
- [1] J. Whyte, M. Dijkers et al., “The Importance of Voluntary Behavior in Rehabilitation Treatment and Outcomes,” Archives of Physical Medicine and Rehabilitation, Vol.100, Issue 1, pp. 156-163, 2018. https://doi.org/10.1016/j.apmr.2018.09.111
- [2] S.-L. Larsson, E. Ekstrand, L.-B. Dahlin, A. Björkman, and E. Brogren, “A self-managed exercise therapy program for wrist osteoarthritis: Study protocol for a randomized controlled trial,” Trials, Vol.24, Article No.628, 2023. https://doi.org/10.1186/s13063-023-07668-4
- [3] Y. Kitano, T. Tanzawa, and K. Yokota, “Development of wearable rehabilitation device using parallel link mechanism: Rehabilitation of compound motion combining palmar/dorsi flexion and radial/ulnar deviation,” ROBOMECH J., Vol.5, Article No.13, 2018. https://doi.org/10.1186/s40648-018-0109-7
- [4] Y.-Y. Su, Y.-L. Yu, C.-H. Lin, and C.-C. Lan, “A compact wrist rehabilitation robot with accurate force/stiffness control and misalignment adaptation,” Int. J. of Intelligent Robotics and Applications, Vol.3, pp. 45-58, 2019. https://doi.org/10.1007/s41315-019-00083-6
- [5] X. Chen, S. Zhang, K. Cao, C. Wei, W. Zhao, and J. Yao, “Development of a Wearable Upper Limb Rehabilitation Robot Based on Reinforced Soft Pneumatic Actuators,” Chinese J. of Mechanical Engineering, Vol.35, Article No.83, 2022. https://doi.org/10.1186/s10033-022-00749-6
- [6] S.-S. Lone, N.-Z. Azlan, and N. Kamarudzaman, “Soft Pneumatic Exoskeleton for Wrist and Thumb Rehabilitation,” Int. J. of Robotics and Control Systems, Vol.1, No.4, pp. 440-452, 2021. https://doi.org/10.31763/ijrcs.v1i4.447
- [7] H. Taniguchi and Y. Naito, “Hand Rehabilitation Device to Prevent Contracture for Finger Joints using Pneumatic Soft Actuators,” Special Issue on ACEIAT & JTSTE-Thailand, pp. 51-56, 2014.
- [8] I. Petre, A. Deaconescu, L. Rogozea, and T.-I. Deaconescu, “Orthopedic Rehabilitation Device Actuated with Pneumatic Muscles,” Int. J. of Advanced Robotics Systems, Vol.11, 2024. https://doi.org/10.5772/58693
- [9] M. Orban, K. Guo, H. Yang, X. Hu, M. Hassaan, and M. Elsamanty, “Soft pneumatic muscles for post-stroke lower limb ankle rehabilitation: Leveraging the potential of soft robotics to optimize functional outcomes,” Frontiers in Bioengineering and Biotechnology, Vol.11, Article No.1251879, 2023. https://doi.org/10.3389/fbioe.2023.1251879
- [10] S. Shimooka, R. Suzuki, T. Uehara, T. Hirayama, and A. Gofuku, “Development of Ankle-Joint Rehabilitation Device for Bedridden Patient Using Fan-Shaped Pneumatic Soft Actuator Driven at Low Pressure,” J. Robot. Mechatron., Vol.35, No.3, pp. 565-576, 2023. https://doi.org/10.20965/jrm.2023.p0565
- [11] M.-U.-A. Khan, A. Ali, R. Muneer, and M. Faisal, “Pneumatic artificial muscle-based stroke rehabilitation device for upper and lower limbs,” Intelligent Service Robotics, Vol.17, pp. 33-42, 2024. https://doi.org/10.1007/s11370-023-00509-y
- [12] Y. Nagata, “Soft Actuators, Forefront of Development,” NTS Ltd., pp. 291-335, 2004.
- [13] Y. Matsui, T. Akagi, and S. Dohta, “Development and Control of Flexible Spherical Actuator for Portable Rehabilitation Device,” Int. J. of Materials Science and Engineering, Vol.3, No.1, pp. 49-54, 2015. http://dx.doi.org/10.12720/ijmse.3.1.49-54
- [14] S. Shimooka, Y. Hane, T. Akagi, S. Dohta, W. Kobayashi, T. Shinohara, and Y. Matsui, “Development and Attitude Control of Washable Portable Rehabilitation Device for Wrist without Position Sensor,” JFPS Int. J. of Fluid Power System, Vol.13, Issue 3, pp. 25-34, 2020. https://doi.org/10.5739/jfpsij.13.25
- [15] M. Aliff, S. Dohta, and T. Akagi, “Simple Trajectory Control Method of Robot Arm using Flexible Pneumatic Cylinders,” J. Robot. Mechatron., Vol.27, No.6, pp. 698-705, 2015. https://doi.org/10.20965/jrm.2015.p0698
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.