Paper:
Realizing the Bending Motion of a McKibben Pneumatic Actuator via Elastic Adhesive Coating
Keiichiro Kan*, Takahiro Goto*
 , Keisuke Naniwa**
, Daisuke Nakanishi***
, Koichi Osuka*
, and Yasuhiro Sugimoto*
, Keisuke Naniwa**
, Daisuke Nakanishi***
, Koichi Osuka*
, and Yasuhiro Sugimoto*
*Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan
**Hokkaido University of Science
7-Jo, 15-4-1 Maeda, Teine, Sapporo, Hokkaido 006-8585, Japan
***National Institute of Technology, Matsue College
14-4 Nishi-ikuma, Matsue, Shimane 690-8518, Japan

Recently, soft actuators have gained considerable attention owing to their flexibility and high output-to-weight ratios. The McKibben pneumatic actuator (MPA), a type of soft artificial muscle, is an actuator that generates force by inflating a rubber tube with compressed air. Conventional MPAs, such as linear actuators, generate force along straight lines; hence, achieving complex movements, such as bending using a single muscle, can be challenging. In this study, we enabled bending movements in MPA by applying an elastic adhesive coating to MPA. Experimental results demonstrated that the coated MPA successfully performed bending movements. Furthermore, we confirmed that the curvature and fiber angles of the coated and uncoated surfaces changed with applied pressure, thereby indicating that the adhesive can be used to control the fiber angles and achieve the desired curvature.
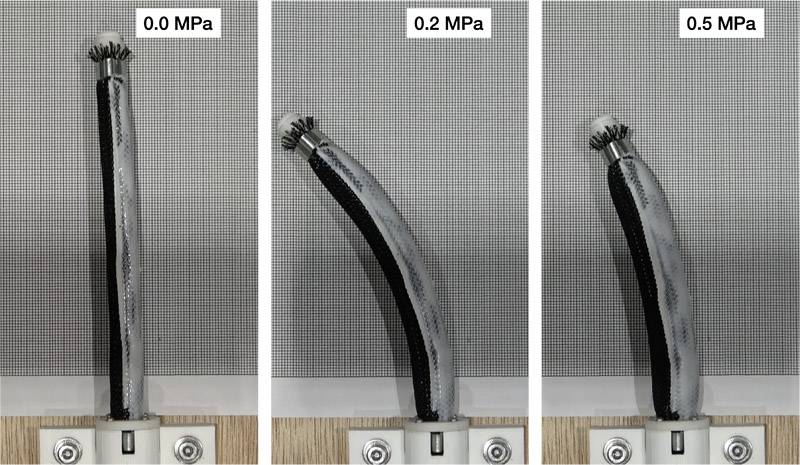
Bending of McKibben pneumatic actuator
- [1] N. El-Atab, R. B. Mishra, F. Al-Modaf, L. Joharji, A. A. Alsharif, H. Alamoudi, M. Diaz, N. Qaiser, and M. M. Hussain, “Soft Actuators for Soft Robotic Applications: A Review,” Advanced Intelligent Systems, Vol.2, No.10, Article No.2000128, 2020. https://doi.org/10.1002/aisy.202000128
- [2] J. Walker, T. Zidek, C. Harbel, S. Yoon, F. S. Strickland, S. Kumar, and M. Shin, “Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators,” Actuators, Vol.9, No.1, Article No.3, 2020. https://doi.org/10.3390/act9010003
- [3] M. Li, A. Pal, A. Aghakhani, A. Pena-Francesch, and M. Sitti, “Soft actuators for real-world applications,” Nature Reviews Materials, Vol.7, No.2, pp. 235-249, 2022. https://doi.org/10.1038/s41578-021-00389-7
- [4] M. Agerholm and A. Lord, “The Artificial Muscle of Mckibben,” The Lancet, Vol.277, No.7178, pp. 660-661, 1961. https://doi.org/10.1016/S0140-6736(61)91676-2
- [5] A. A. M. Faudzi, G. Endo, S. Kurumaya, and K. Suzumori, “Long-Legged Hexapod Giacometti Robot Using Thin Soft McKibben Actuator,” IEEE Robotics and Automation Letters, Vol.3, No.2, pp. 100-107, 2018. https://doi.org/10.1109/LRA.2017.2734244
- [6] R. Niiyama, A. Nagakubo, and Y. Kuniyoshi, “Mowgli: A Bipedal Jumping and Landing Robot with an Artificial Musculoskeletal System,” Proc. 2007 IEEE Int. Conf. on Robotics and Automation, pp. 2546-2551, 2007. https://doi.org/10.1109/ROBOT.2007.363848
- [7] T. Takuma and K. Hosoda, “Controlling the Walking Period of a Pneumatic Muscle Walker,” The Int. J. of Robotics Research, Vol.25, No.9, pp. 861-866, 2006. https://doi.org/10.1177/0278364906069187
- [8] B. Tondu, S. Ippolito, J. Guiochet, and A. Daidie, “A Seven-degrees-of-freedom Robot-arm Driven by Pneumatic Artificial Muscles for Humanoid Robots,” The Int. J. of Robotics Research, Vol.24, No.4, pp. 257-274, 2005. https://doi.org/10.1177/0278364905052437
- [9] M. Wisse and J. von Frankenhyyzen, “Design and Construction of MIKE; a 2-D Autonomous Biped Based on Passive Dynamic Walking,” Adaptive Motion of Animals and Machines, pp. 143-154, 2003. https://doi.org/10.1007/4-431-31381-8_13
- [10] B. Tondu and P. Lopez, “Modeling and control of McKibben artificial muscle robot actuators,” IEEE Control Systems Magazine, Vol.20, No.2, pp. 15-38, 2000. https://doi.org/10.1109/37.833638
- [11] C.-P. Chou and B. Hannaford, “Measurement and modeling of McKibben pneumatic artificial muscles,” IEEE Trans. on Robotics and Automation, Vol.12, No.1, pp. 90-102, 1996. https://doi.org/10.1109/70.481753
- [12] G. K. Klute and B. Hannaford, “Accounting for Elastic Energy Storage in McKibben Artificial Muscle Actuators,” J. of Dynamic Systems, Measurement, and Control, Vol.122, No.2, pp. 386-388, 2000. https://doi.org/10.1115/1.482478
- [13] Y. Sugimoto, K. Naniwa, K. Osuka, and Y. Sankai, “Static and dynamic properties of McKibben pneumatic actuator for self-stability of legged-robot motion,” Advanced Robotics, Vol.27, No.6, pp. 469-480, 2013. https://doi.org/10.1080/01691864.2013.763007
- [14] T. Nozaki and T. Noritsugu, “Motion Analysis of McKibben Type Pneumatic Rubber Artificial Muscle with Finite Element Method,” Int. J. Automation Technol., Vol.8, No.2, pp. 147-158, 2014. https://doi.org/10.20965/ijat.2014.p0147
- [15] F. Zhao, S. Dohta, and T. Akagi, “Development and Analysis of Bending Actuator Using McKibben Artificial Muscle,” J. of System Design and Dynamics, Vol.6, No.2, pp. 158-169, 2012. https://doi.org/10.1299/jsdd.6.158
- [16] K. Suzumori, S. Wakimoto, K. Miyoshi, and K. Iwata, “Long bending rubber mechanism combined contracting and extending fluidic actuators,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4454-4459, 2013. https://doi.org/10.1109/IROS.2013.6696996
- [17] T. Doi, S. Wakimoto, K. Suzumori, and K. Mori, “Proposal of flexible robotic arm with thin McKibben actuators mimicking octopus arm structure,” 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS2016), pp. 5503-5508, 2016. https://doi.org/10.1109/IROS.2016.7759809
- [18] M. F. Mohamed, A. S. M. Hanif, and A. A. Faudzi, “Segmentation of a Soft Body and its Bending Performance using Thin McKibben Muscle,” Int. J. of Automotive and Mechanical Engineering, Vol.17, No.1, pp. 7533-7541, 2020. https://doi.org/10.15282/ijame.17.1.2020.02.0557
- [19] M. Tschiersky, E. E. G. Hekman, D. M. Brouwer, J. L. Herder, and K. Suzumori, “A Compact McKibben Muscle Based Bending Actuator for Close-to-Body Application in Assistive Wearable Robots,” IEEE Robotics and Automation Letters, Vol.5, No.2, pp. 3042-3049, 2020. https://doi.org/10.1109/LRA.2020.2975732
- [20] D. Bruder and R. J. Wood, “The Chain-Link Actuator: Exploiting the Bending Stiffness of McKibben Artificial Muscles to Achieve Larger Contraction Ratios,” IEEE Robotics and Automation Letters, Vol.7, No.1, pp. 542-548, 2022. https://doi.org/10.1109/LRA.2021.3130627
- [21] C. Xiang, J. Guo, Y. Chen, L. Hao, and S. Davis, “Development of a SMA-Fishing-Line-McKibben Bending Actuator,” IEEE Access, Vol.6, pp. 27183-27189, 2018. https://doi.org/10.1109/ACCESS.2018.2830314
- [22] A. A. M. Faudzi, M. R. M. Razif, G. Endo, H. Nabae, and K. Suzumori, “Soft-amphibious robot using thin and soft McKibben actuator,” 2017 IEEE Int. Conf. on Advanced Intelligent Mechatronics (AIM2017), pp. 981-986, 2017. https://doi.org/10.1109/AIM.2017.8014146
- [23] K. Takashima, J. Rossiter, and T. Mukai, “McKibben artificial muscle using shape-memory polymer,” Sensors and Actuators A: Physical, Vol.164, Nos.1-2, pp. 116-124, 2010. https://doi.org/10.1016/j.sna.2010.09.010
- [24] D.-H. Chen, Y. Koyama, S. Ozaki, and H. Kobayashi, “Study on Shorting Mechanics of McKibben Actuator,” Trans. of the Japan Society of Mechanical Engineers, Series A, Vol.74, No.739, pp. 442-449, 2008. https://doi.org/10.1299/kikaia.74.442
- [25] T. Nozaki and T. Noritsugu, “Force Analysis of McKibben Type Pneumatic Rubber Artificial Muscle with Finite Element Method: Model without Friction between Plastics Fibers (Mechanical Systems),” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.76, No.763, pp. 580-586, 2010. https://doi.org/10.1299/kikaic.76.580
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.