Paper:
LiDAR Based Road Detection and Control for Agricultural Vehicles
Keita Kurashiki*, Kazuki Kono**, and Takanori Fukao***

*National Agriculture and Food Research Organization (NARO)
1-31-1 Kannondai, Tsukuba, Ibaraki 305-0856, Japan
**Ritsumeikan University
1-1-1 Nojihigashi, Kusatsu, Shiga 525-8577, Japan
***The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan

Recently, the population of agricultural workers in Japan has been declining and aging. As a result, labor shortages have become a serious problem in the agricultural industry. However, the strong dependence on food imports has become a problem. To address this situation, it is necessary to increase the efficiency of food production by automating agricultural work. In this study, we focus on transportation in farming, and develop an unmanned transportation truck. Farm roads are often unpaved or otherwise uneven, and the surrounding environment changes dramatically depending on road surface conditions, vegetation, weather, and season. To realize an unmanned transportation system, achieving robust environmental recognition and operational control is important. Although it is almost certain that no single method can manage all situations for this goal, as part of the system, we propose a method for generating a target path for farming environments using 3D LiDAR (Light Detection and Ranging), and apply a control law to follow the path on uneven surfaces robustly. Furthermore, we generate two types of paths, one based on the center of the drivable area and the other based on road surface geometry, and integrate them into a target path based on their reliability. A nonlinear path-following control law is designed to follow the target path. The proposed method was applied to an experimental truck, and stability was achieved on a real farm road.
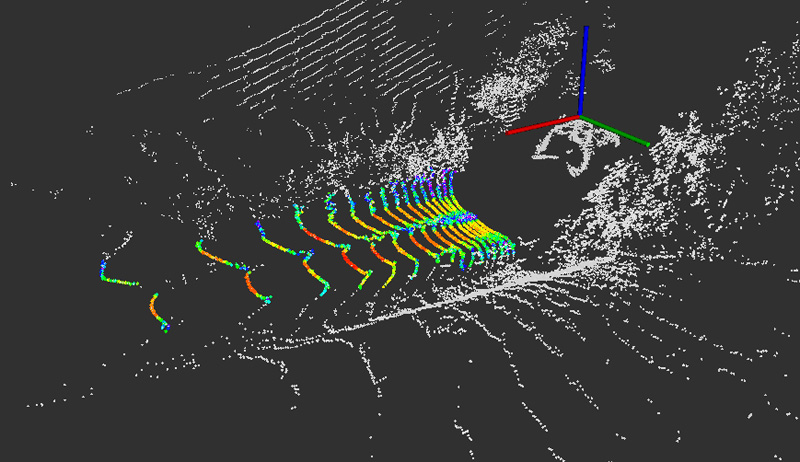
Drivable area detection on unpaved road
- [1] N. Noguchi, “Agricultural vehicle robot,” J. Robot. Mechatron., Vol.30, No.2, pp. 165-172, 2018. https://doi.org/10.20965/jrm.2018.p0165
- [2] A. Alberto-Rodriguez, M. Neri-Muñoz, J.-c. Fernández, M. Márquez-Vera, L. Ramos-Velasco, O. Díaz-Parra, and E. Hernández-Huerta, “Review of control on agricultural robot tractors,” Int. J. of Combinatorial Optimization Problems and Informatics, Vol.11, No.3, pp. 9-20, 2020.
- [3] J. Betz, H. Zheng, A. Liniger, U. Rosolia, P. Karle, M. Behl, V. Krovi, and R. Mangharam, “Autonomous vehicles on the edge: A survey on autonomous vehicle racing,” IEEE Open J. of Intelligent Transportation Systems, Vol.3, pp. 458-488, 2022. https://doi.org/10.1109/OJITS.2022.3181510
- [4] S.-H. An, B.-H. Lee, and D.-R. Shin, “A survey of intelligent transportation systems,” Third Int. Conf. on Computational Intelligence, Communication Systems and Networks, pp. 332-337, 2011. https://doi.org/10.1109/CICSyN.2011.76
- [5] K. Maeda, J. Takahashi, and P. Raksincharoensak, “Lane-marker-based map construction and map precision evaluation methods using on-board cameras for autonomous driving,” J. Robot. Mechatron., Vol.32, No.3, pp. 613-623, 2020. https://doi.org/10.20965/jrm.2020.p0613
- [6] M. Aldibaja, N. Suganuma, and R. Yanase, “2.5D layered sub-image lidar maps for autonomous driving in multilevel environments,” Remote Sensing, Vol.14, No.22, Article No.5847, 2022. https://doi.org/10.3390/rs14225847
- [7] N. V. Nguyen and W. Cho, “Performance evaluation of a typical low-cost multi-frequency multi-gnss device for positioning and navigation in agriculture part 2: Dynamic testing,” AgriEngineering, Vol.5, No.1, pp. 127-140, 2023. https://doi.org/10.3390/agriengineering5010008
- [8] C. Sammut and G. I. Webb (Eds.), “Expectation-Maximization Algorithm,” Boston, MA: Springer US, pp. 387-387, 2010. https://doi.org/10.1007/978-0-387-30164-8_291
- [9] R. B. Rusu and S. Cousins, “3D is here: Point Cloud Library (PCL),” IEEE Int. Conf. on Robotics and Automation (ICRA), 2011. https://doi.org/10.1109/ICRA.2011.5980567
- [10] S. Boyd and L. Vandenberghe, “Introduction to Applied Linear Algebra: Vectors, Matrices, and Least Squares,” Cambridge University Press, 2018. https://doi.org/10.1017/9781108583664
- [11] Y. Kanayama, Y. Kimura, F. Miyazaki, and T. Noguchi, “A stable tracking control method for an autonomous mobile robot,” IEEE Int. Conf. on Robotics and Automation, pp. 384-389, 1990. https://doi.org/10.1109/ROBOT.1990.126006
- [12] C. Samson, “Path following and time-varying feedback stabilazation of a wheeled mobile robot,” Int. Conf. on Automation, Robotics and Computer Vision, 1992.
- [13] T. Fukao, “Inverse optimal tracking control of a nonholonomic mobile robot,” 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vol.2, pp. 1475-1480, 2004. https://doi.org/10.1109/IROS.2004.1389604
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.