Paper:
Photogrammetry-Based Photic Seafloor Surveying and Analysis with Low-Cost Autonomous Underwater and Surface Vehicles
Marie Angelyn Mercado
 , Yuki Sekimori
, Amane Toriyama, Masaki Ohashi, Sehwa Chun
, and Toshihiro Maki
, Yuki Sekimori
, Amane Toriyama, Masaki Ohashi, Sehwa Chun
, and Toshihiro Maki
Institute of Industrial Science, The University of Tokyo
4-6-1 Komaba, Meguro-ku, Tokyo 153-8505, Japan

This study explores advanced methods for underwater visual surveys in the photic zone using low-cost autonomous underwater and surface vehicles to enhance marine ecosystem monitoring and analysis. It addresses the challenges of underwater photogrammetry, including data post-processing and analysis, by introducing geo-reference estimation techniques for autonomous-under-vehicle-mounted cameras. Through a novel validation method based on trajectory overlaps and application to real-world datasets, the research demonstrates the effectiveness of these approaches in complex underwater environments. The findings contribute to improving the accuracy of three-dimensional reconstructions of the seafloor, offering significant implications for marine conservation and ecosystem management.
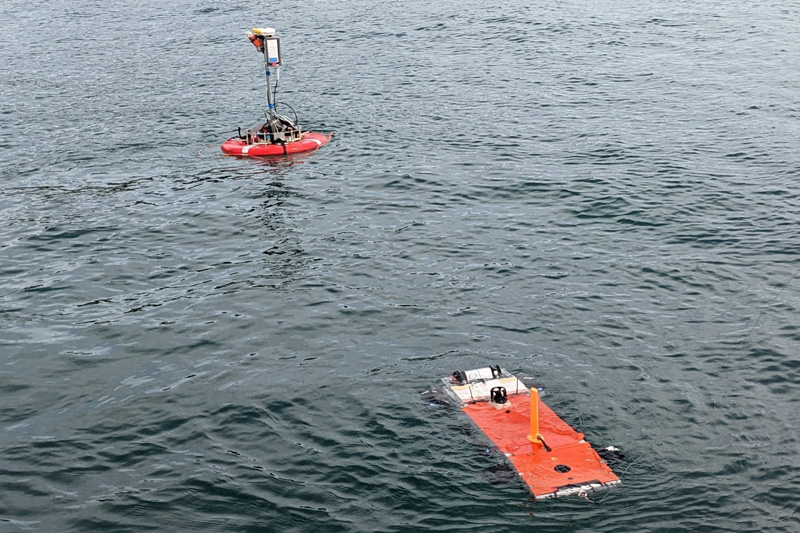
Low-cost AUV-ASV system for underwater surveying
- [1] T. Maki et al., “Low-altitude and high-speed terrain tracking method for lightweight AUVs,” J. Robot. Mechatron., Vol.30, No.6, pp. 971-979, 2018. https://doi.org/10.20965/jrm.2018.p0971
- [2] Y. Noguchi, M. Humblet, Y. Furushima, S. Ito, and T. Maki, “Wide-area three-dimensional imaging of mesophotic coral reefs using a low-cost AUV,” Marine Technology Society J., Vol.56, No.4, pp. 74-89, 2022. https://doi.org/10.4031/MTSJ.56.4.4
- [3] T. Ohki, T. Nakatani, Y. Nishida, and B. Thornton, “Fast and ultra-wide area bathymetric survey system without support vessel,” Proc. of 2018 OCEANS – MTS/IEEE Kobe Techno-Oceans, 2018. https://doi.org/10.1109/OCEANSKOBE.2018.8559056
- [4] D. T. I. Bayley and A. O. M. Mogg, “A protocol for the large-scale analysis of reefs using Structure from Motion photogrammetry,” Methods in Ecology and Evolution, Vol.11, No.11, pp. 1410-1420, 2020. https://doi.org/10.1111/2041-210X.13476
- [5] J. S. Jaffe, “Computer modeling and the design of optimal underwater imaging systems,” IEEE J. of Oceanic Engineering, Vol.15, No.2, pp. 101-111, 1990. https://doi.org/10.1109/48.50695
- [6] Y. Nishida et al., “Development of an autonomous buoy system for AUV,” Proc. of OCEANS 2015, 2015. https://doi.org/10.1109/OCEANS-Genova.2015.7271614
- [7] Y. Sekimori, H. Horimoto, Y. Noguchi, T. Matsuda, and T. Maki, “Scalable real-time global self-localization of multiple AUV system using azimuth, elevation, and depth difference acoustic positioning,” Proc. of OCEANS 2021, 2021. https://doi.org/10.23919/OCEANS44145.2021.9705991
- [8] T. Guo et al., “Accuracy assessment of underwater photogrammetric three dimensional modelling for coral reefs,” The Int. Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol.XLI-B5, pp. 821-828, 2016. https://doi.org/10.5194/isprsarchives-XLI-B5-821-2016
- [9] F. Russo, S. Del Pizzo, F. Di Ciaccio, and S. Troisi, “An enhanced photogrammetric approach for the underwater surveying of the Posidonia meadow structure in the Spiaggia Nera area of Maratea,” J. of Imaging, Vol.9, No.6, Article No.113, 2023. https://doi.org/10.3390/jimaging9060113
- [10] G. A. Hatcher et al., “Accurate bathymetric maps from underwater digital imagery without ground control,” Frontiers in Marine Science, Vol.7, Article No.525, 2020. https://doi.org/10.3389/fmars.2020.00525
- [11] T. Maki et al., “AUV HATTORI: A lightweight platform for high-speed low-altitude survey of rough terrains,” Proc. of OCEANS 2017, 2017.
- [12] H. Horimoto, S. Tejima, K. Ohkuma, and T. Maki, “Development of autonomous acoustic positioning buoy,” Proc. of 2021 JSME Annual Conf. on Robotics and Mechatronics, Article No.1A1-B16, 2021. https://doi.org/10.1299/jsmermd.2021.1A1-B16
- [13] M. A. Mercado, K. Ishii, and J. Ahn, “Deep-sea image enhancement using multi-scale retinex with reverse color loss for autonomous underwater vehicles,” Proc. of OCEANS 2017, 2017.
- [14] K. Zuiderveld, “Contrast limited adaptive histograph equalization,” P. S. Heckbert (Ed.), “Graphic Gems IV,” pp. 474-485, Academic Press Professional, Inc., 1994.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.