Paper:
WORMESH-I: Introducing a Robot Concept Bio-Inspired by Flatworms, Developing a Mechanical Model, and Creating Locomotion via Pedal Waves
Ryuichi Hodoshima
 , Kunihiko Sato, Ganegoda Vidanage Charaka Rasanga, and Shinya Kotosaka
, Kunihiko Sato, Ganegoda Vidanage Charaka Rasanga, and Shinya Kotosaka
Department of Science and Mechanical Engineering, Saitama University
255 Shimo-Okubo, Sakura-ku, Saitama, Saitama 338-8570, Japan

Flatworms exhibit remarkable pedal-wave-driven locomotion abilities through their dorsoventrally flattened, bilaterally symmetrical bodies, which glide smoothly across various surfaces. This study introduces a bio-inspired mobile robot prototype designed to mimic flatworm movement that leverage the advantages of pedal locomotion on challenging terrains. The robot design includes a mesh-like structure with interconnected body modules linked via multi-degree-of-freedom joints for enhanced movement versatility. A modified universal joint that functions as a constant-velocity joint connects the modules, thereby enabling complex motion patterns. We explored four types of traveling waves, inspired by gastropod locomotion to achieve diverse movements, including translational, spinning, and omnidirectional motions. This study comprehensively examines the movement characteristics and performance of the prototype, highlighting its potential applications in complex environments in which traditional locomotion methods are less effective.
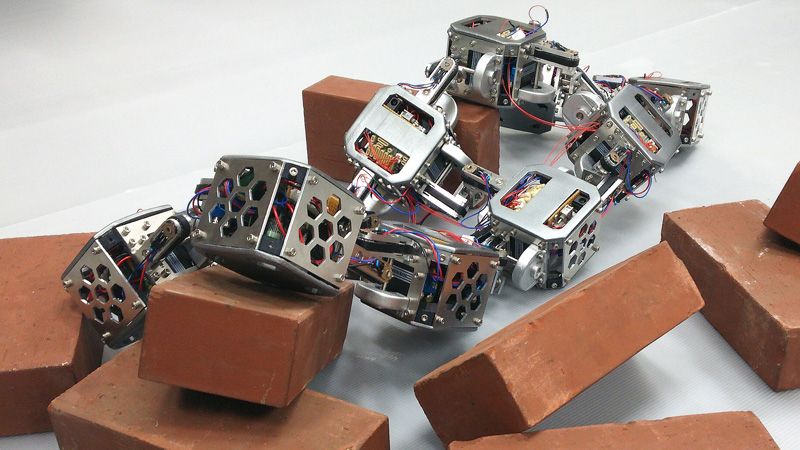
WORMESH-I: a prototype flatworm-like robot
- [1] S. Hirose, “Biologically Inspired Robots. Snake-Like Locomotors and Manipulators,” Oxford University Press, 1993.
- [2] M. Mori, H. Yamada, and S. Hirose, “Design and Development of Active Cord Mechanism “ACM-R3” and its 3-dimensional Locomotion Control,” J. of the Robotics Society of Japan, Vol.23, No.7, pp. 886-897, 2005. https://doi.org/10.7210/jrsj.23.886
- [3] C. Wright, A. Buchan, B. Brown, J. Geist, M. Schwerin, D. Rollinson, M. Tesch, and H. Choset, “Design and Architecture of the Unified Modular Snake Robot,” Proc. of the 2012 IEEE Int. Conf. on Robotics and Automation, pp. 4347-4354, 2012. https://doi.org/10.1109/ICRA.2012.6225255
- [4] H. Omori, T. Nakamura, and T. Yada, “An Underground Explorer Robot Based on Peristaltic Clawing of Earthworms,” Industrial Robot, Vol.36, No.4, pp. 358-364, 2009. https://doi.org/10.1108/01439910910957129
- [5] A. S. Boxerbaum, K. M. Shaw, H. J. Chiel, and R. D. Quinn, “Continuous wave peristaltic motion in a robot,” The Int. J. of Robotics Research, Vol.31, No.3, pp. 302-318, 2009. https://doi.org/10.1177/0278364911432486
- [6] T. Yue, H. Bloomfield-Gadêlha, and J. Rossiter, “Snail-inspired water-enhanced soft sliding suction for climbing robots,” Nature Communications, Vol.15, Article No.4038, 2024. https://doi.org/10.1038/s41467-024-48293-2
- [7] M. Watanabe and H. Tsukagoshi, “Snail inspired climbing robot using fluid adhesion to travel on rough concrete walls and ceilings,” M. O. Tokhi and G. S. Virk (Eds.), “Advances in Cooperative Robotics – Proc. of the 19th Int. Conf. on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR 2016),” pp. 79-87, World Scientific Publishing, 2016. https://doi.org/10.1142/9789813149137_0013
- [8] M. V. K. Sukhdeo and S. C. Sukhdeo, “Fixed behaviours and migration in parasitic flatworms,” Int. J. for Parasitology, Vol.32, No.3, pp. 329-342, 2002. https://doi.org/10.1016/S0020-7519(01)00334-4
- [9] J. Zou et al., “A reconfigurable omnidirectional soft robot based on caterpillar locomotion,” Soft Robotics, Vol.5, No.2, pp. 164-174, 2018. https://doi.org/10.1089/soro.2017.0008
- [10] W. Zhang et al., “A reconfigurable soft wall-climbing robot actuated by electromagnet,” Int. J. of Advanced Robotic Systems, Vol.18, No.2, 2021. https://doi.org/10.1177/1729881421992285
- [11] G. V. C. Rasanga, R. Hodoshima, and S. Kotosaka, “The Flatworm-Like Pedal Locomotory Robot WORMESH-I: Locomotion Based on the Combination of Pedal Waves,” Proc. of the 2021 IEEE/SICE Int. Symposium on System Integration, Article No.TuC3.1, 2021. https://doi.org/10.1109/IEEECONF49454.2021.9382769
- [12] J. D. Murray, “Mathematical Biology: I. An Introduction,” Third Edition, Springer, 2002.
- [13] M. Iwamoto, “Mechanism and Control on Adhesive Locomotion in Gastropods,” Bulletin of the Japan Society for Industrial and Applied Mathematics, Vol.26, No.2, pp. 14-21, 2016. https://doi.org/10.11540/bjsiam.26.2_14
- [14] H. Ohno and S. Hirose, “Design of Slim Slime Robot and its Gait of Locomotion,” Proc. of the 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.2, pp. 707-715, 2001. https://doi.org/10.1109/IROS.2001.976252
- [15] H. Yamada and S. Hirose, “Study of Active Cord Mechanism—Approximations to Continuous Curves of a Multi-joint Body—,” J. of the Robotics Society of Japan, Vol.26, No.1, pp. 110-120, 2008. https://doi.org/10.7210/jrsj.26.110
- [16] M. Iwamoto, D. Ueyama, and R. Kobayashi, “The advantage of mucus for adhesive locomotion in gastropods,” J. of Theoretical Biology, Vol.353, pp. 133-141, 2014. https://doi.org/10.1016/j.jtbi.2014.02.024
- [17] S. Kuroda et al., “Common mechanics of mode switching in locomotion of limbless and legged animals,” J. of the Royal Society Interface, Vol.11, No.95, 2014. https://doi.org/10.1098/rsif.2014.0205
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.