Paper:
Grasping of Cylindrical Structures Using an Underwater Snake Robot Without Force/Torque Sensors and Actuator Waterproofing
Atsushi Kakogawa
 , Shah Darshankumar Rajendrakumar, and Yuto Iwasaki
, Shah Darshankumar Rajendrakumar, and Yuto Iwasaki
Department of Robotics, Ritsumeikan University
1-1-1 Nojihigashi, Kusatsu, Shiga 525-8577, Japan

This paper presents an underwater snake robot composed of submersible actuators designed for minimal friction, a lubricant-free gear reducer, and no waterproof sealing. This makes it suitable for direct exposure to water. In particular, this paper focuses on underwater interactive tasks with an object. Static force analysis for straightforward tasks, such as the wrapping of a pole structure, is conducted. Experiments were performed to evaluate the snake robot outside a water environment. The results indicated that the static model was valid, although the errors were not negligible. The potential of executing various tasks with this sensorless underwater snake robot, such as wrapping around the pole and its collection or turning on/off a lever underwater, is presented.
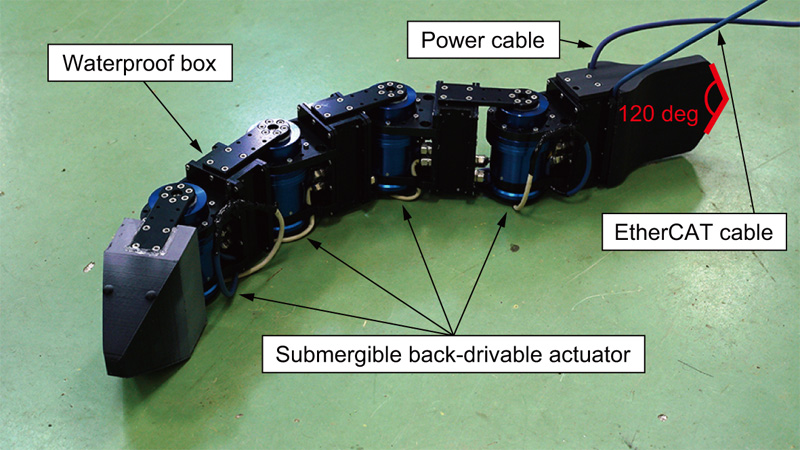
Assembled underwater snake robot
- [1] S. Hirose, “Biologically inspired robots: Snake-Like Locomotors and Manipulators,” Oxford University Press, 1993.
- [2] B. L. Southall, A. E. Bowles, W. T. Ellison, J. J. Finneran, R. L. Gentry, C. R. Greene Jr, D. Kastak, D. R. Ketten, J. H. Miller, P. E. Nachtigall et al., “Marine mammal noise-exposure criteria: Initial scientific recommendations,” Bioacoustics, Vol.17, Issues 1-3, pp. 273-275, 2008. https://doi.org/10.1080/09524622.2008.9753846
- [3] R. Wang, S. Wang, Y. Wang, L. Cheng, and M. Tan, “Development and motion control of biomimetic underwater robots: A survey,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, Vol.52, Issue 2, pp. 833-844, 2022. https://doi.org/10.1109/TSMC.2020.3004862
- [4] S. Chigisaki, M. Mori, H. Yamada, and S. Hirose, “Design and control of amphibious snake-like robot “ACM-R5”,” Proc. of JSME annual Conf. on Robotics and Mechatronics (Robomec2005), 2005 (in Japanese).
- [5] E. Kelasidi, P. Liljebäck, K. Y. Pettersen, and J. T. Gravdahl, “Experimental investigation of efficient locomotion of underwater snake robots for lateral undulation and eel-like motion patterns,” Robotics and Biomimetics, Vol.2, Article No.8, 2015. https://doi.org/10.1186/s40638-015-0029-4
- [6] G. Marani, S. K. Choi, and J. Yuh, “Underwater autonomous manipulation for intervention missions AUVs,” Ocean Engineering, Vol.36, Issue 1, pp. 15-23, 2009. https://doi.org/10.1016/j.oceaneng.2008.08.007
- [7] D. Rollinson, Y. Bilgen, B. Brown, F. Enner, S. Ford, C. Layton, J. Rembisz, M. Schwerin, A. Willig, P. Velagapudi, and H. Choset, “Design and architecture of a series elastic snake robot,” Proc. of 2014 IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 4630-4636, 2014. https://doi.org/10.1109/IROS.2014.6943219
- [8] P. Liljebäck, Ø. Stavdahl, K. Y. Pettersen, and J. T. Gravdahl, “Mamba – A waterproof snake robot with tactile sensing,” Proc. of 2014 IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 294-301, 2014. https://doi.org/10.1109/IROS.2014.6942575
- [9] B. A. Elsayed, T. Takemori, M. Tanaka, and F. Matsuno, “Mobile manipulation using a snake robot in a helical gait,” IEEE/ASME Trans. on Mechatronics, Vol.27, Issue 5, pp. 2600-2611, 2021. https://doi.org/10.1109/TMECH.2021.3114168
- [10] T. Takemori, M. Tanaka, and F. Matsuno, “Ladder climbing with a snake robot,” Proc. of 2018 IEEE/RSJ Int. Conf. Intelligent Robots and Systems, 2018. https://doi.org/10.1109/IROS.2018.8594411
- [11] E. Kelasidi, K. Y. Pettersen, J. T. Gravdahl, and P. Liljebäck, “Modeling of underwater snake robots,” Proc. of 2014 IEEE Int. Conf. on Robotics and Automation, pp. 4540-4547, 2014. https://doi.org/10.1109/ICRA.2014.6907522
- [12] A. Zhang, S. Ma, B. Li, M. Wang, X. Guo, and Y. Wang, “Adaptive controller design for underwater snake robot with unmatched uncertainties,” Science China Information Sciences, Vol.59, Article No.052205, 2016. https://doi.org/10.1007/s11432-015-5421-8
- [13] S. D. Rajendrakumar, A. Kakogawa, and S. Ma, “An Underwater Snake Robot that Does Not Consider Actuators’ Waterproof: Design and Primary Experiments,” Proc. of 2023 IEEE Int. Conf. Robotics and Biomimetics, pp. 226-231, 2023. https://doi.org/10.1109/ROBIO58561.2023.10354774
- [14] Z. Huang, S. Ma, Z. Lin, K. Zhu, P. Wang, R. Ahmed, C. Ren, and H. Marvi, “Impact of Caudal Fin Geometry on The Swimming Performance of a Snake-like Robot,” Ocean Engineering, Vol.245, Article No.110372, 2022. https://doi.org/10.1016/j.oceaneng.2021.110372
- [15] E. Kelasidi, A. M. Kohl, K. Y. Pettersen, B. H. Hoffmann, and J. T. Gravdahl, “Experimental Investigation of Locomotion Efficiency and Path-following for Underwater Snake Robots with and without a Caudal Fin,” Annual Reviews in Control, Vol.46, pp. 281-294, 2018. https://doi.org/10.1016/j.arcontrol.2018.10.001
- [16] A. Kakogawa and S. Ma, “Design of a Multilink-articulated Wheeled Pipeline Inspection Robot using Only Passive Elastic Joints,” Advanced Robotics, Vol.32, Issue 1, pp. 37-50, 2018. https://doi.org/10.1080/01691864.2017.1393348
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.