Paper:
Hybrid RobOstrich Manipulator with Intrinsic and Extrinsic Actuations
Takeru Manome and Ryuma Niiyama

Mechanical Engineering Program, Graduate School of Science and Technology, Meiji University
1-1-1 Higashi-mita, Tama-ku, Kawasaki, Kanagawa 214-8571, Japan

Ostrich neck-inspired manipulators have attracted attention in the field of bio-inspired robotics. They achieve unique movements that are difficult for conventional robots, owing to their flexibility. However, it is difficult to mimic the length, mass, and actuation redundancy of ostrich necks. This is because the longer and heavier the robotic arm, the greater is the load on the joints. Furthermore, if a robotic arm exhibits actuation redundancy, its structure and control become more complex. In this study, we developed a hybrid RobOstrich manipulator with both intrinsic and extrinsic actuations. This is the third-generation of the RobOstrich series. The manipulator consists of a servomotor attached to each joint that performs intrinsic actuation and two servomotors on the base that perform extrinsic actuation through wires. We conducted an experiment to reproduce the rolling pattern, which is a unique movement of the ostrich neck, to verify the effect of hybrid actuation. The results indicated that the joint angle error and required torque were reduced by applying hybrid actuation.
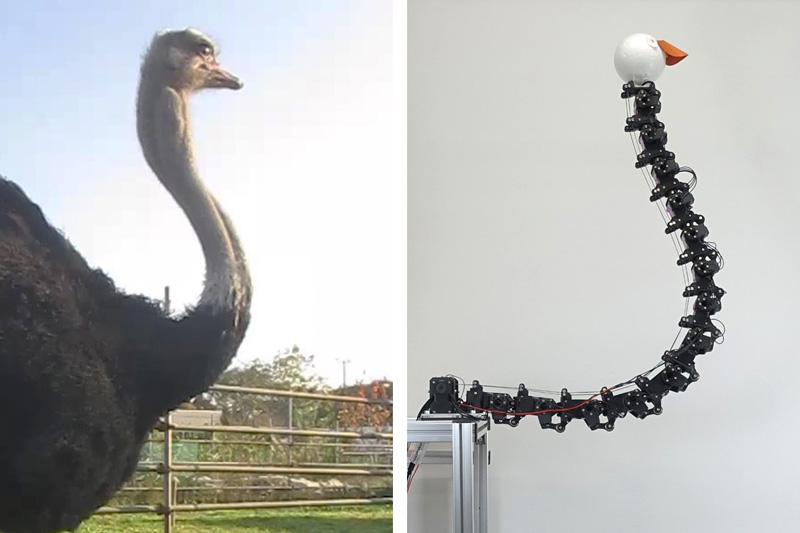
Real ostrich and hybrid RobOstrich manipulator
- [1] H. Mochiyama, M. Gunji, and R. Niiyama, “Ostrich-Inspired Soft Robotics: A Flexible Bipedal Manipulator for Aggressive Physical Interaction,” J. Robot. Mechatron., Vol.34, No.2, pp. 212-218, 2022. https://doi.org/10.20965/jrm.2022.p0212
- [2] K. Misu, M. Ikeda, K. Or, M. Ando, M. Gunji, H. Mochiyama, and R. Niiyama, “Robostrich Arm: Wire-Driven High-DOF Underactuated Manipulator,” J. Robot. Mechatron., Vol.34, No.2, pp. 328-338, 2022. https://doi.org/10.20965/jrm.2022.p0328
- [3] K. Nakano, M. Ikeda, K. Or, K. Misu, M. Gunji, H. Mochiyama, R. Niiyama, and Y. Kuniyoshi, “A Study of Sagittal Motions with a Flexible Manipulator Based on the Anatomy of the Ostrich Neck,” The Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec), Vol.2022, Article No.2A1-S09, 2022. https://doi.org/10.1299/jsmermd.2022.2A1-S09
- [4] K. Nakano, M. Gunji, M. Ikeda, K. Or, M. Ando, K. Inoue, H. Mochiyama, K. Nakajima, R. Niiyama, and Y. Kuniyoshi, ““RobOstrich” Manipulator: A Novel Mechanical Design and Control Based on the Anatomy and Behavior of an Ostrich Neck,” IEEE Robotics and Automation Letters, Vol.8, No.5, pp. 3062-3069, 2023. https://doi.org/10.1109/LRA.2023.3265301
- [5] G. Robinson and J. Davies, “Continuum robots – A state of the art,” Proc. 1999 IEEE Int. Conf. on Robotics and Automation, Vol.4, pp. 2849-2854, 1999. https://doi.org/10.1109/ROBOT.1999.774029
- [6] A. Wolf, H. Brown, R. Casciola, A. Costa, M. Schwerin, E. Shamas, and H. Choset, “A mobile hyper redundant mechanism for search and rescue tasks,” Proc. 2003 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2003), Vol.3, pp. 2889-2895, 2003. https://doi.org/10.1109/IROS.2003.1249309
- [7] G. Endo, A. Horigome, and A. Takata, “Super Dragon: A 10-m-Long-Coupled Tendon-Driven Articulated Manipulator,” IEEE Robotics and Automation Letters, Vol.4, No.2, pp. 934-941, 2019. https://doi.org/10.1109/LRA.2019.2894855
- [8] Y. Shizume, A. Takata, and G. Endo, “Enhancement of Control Stability Using Double Pulleys for Coupled Tendon-Driven Long-Reach Manipulator “Super Dragon”,” J. Robot. Mechatron., Vol.36, No.1, pp. 21-29, 2024. https://doi.org/10.20965/jrm.2024.p0021
- [9] G. Immega and K. Antonelli, “The KSI tentacle manipulator,” Proc. of 1995 IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 3149-3154, 1995. https://doi.org/10.1109/ROBOT.1995.525733
- [10] G. Immega, K. Antonelli, and J. Ko, “Teleoperation of the KSI Tentacle Manipulator for hot cell decontamination,” 1995 IEEE Int. Conf. on Systems, Man and Cybernetics: Intelligent Systems for the 21st Century, Vol.3, pp. 2133-2136, 1995. https://doi.org/10.1109/ICSMC.1995.538095
- [11] A. H. J. van der Leeuw, R. G. Bout, and G. A. Zweers, “Control of the Cranio-Cervical System During Feeding in Birds,” American Zoologist, Vol.41, No.6, pp. 1352-1363, 2001. https://doi.org/10.1093/icb/41.6.1352
- [12] G. Dzemski and A. Christian, “Flexibility along the neck of the ostrich (Struthio camelus) and consequences for the reconstruction of dinosaurs with extreme neck length,” J. of Morphology, Vol.268, No.8, pp. 701-714, 2007. https://doi.org/10.1002/jmor.10542
- [13] A. Christian and G. Dzemski, “Reconstruction of the cervical skeleton posture of Brachiosaurus brancai Janensch, 1914 by an analysis of the intervertebral stress along the neck and a comparison with the results of different approaches,” Fossil Record, Vol.10, No.1, pp. 38-49, 2007. https://doi.org/10.1002/mmng.200600017
- [14] M. J. Cobley, E. J. Rayfield, and P. M. Barrett, “Inter-Vertebral Flexibility of the Ostrich Neck: Implications for Estimating Sauropod Neck Flexibility,” PLOS ONE, Vol.8, No.8, Article No.e72187, 2013. https://doi.org/10.1371/journal.pone.0072187
- [15] M. J. Cobley, “The Flexibility and Musculature of the Ostrich Neck: Implications for the Feeding Ecology and Reconstruction of the Sauropoda (Dinosauria:Saurischia),” 2013. https://doi.org/10.48550/arXiv.1302.3861
- [16] Z. Mu, L. Zhang, L. Yan, Z. Li, R. Dong, C. Wang, and N. Ding, “Hyper-Redundant Manipulators for Operations in Confined Space: Typical Applications, Key Technologies, and Grand Challenges,” IEEE Trans. on Aerospace and Electronic Systems, Vol.58, No.6, pp. 4928-4937, 2022. https://doi.org/10.1109/TAES.2022.3217746
- [17] Y. Wang, Q. Yan, T. Li, G. Tuo, X. Li, and H. Liu, “Efficient Inverse Kinematics Optimization Solution Method of Smooth Configuration for Hyper-redundant Robot,” 2021 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 625-630, 2021. https://doi.org/10.1109/ROBIO54168.2021.9739451
- [18] J. Hollerbach and K. Suh, “Redundancy resolution of manipulators through torque optimization,” IEEE J. on Robotics and Automation, Vol.3, No.4, pp. 308-316, 1987. https://doi.org/10.1109/JRA.1987.1087111
- [19] G. S. Chirikjian and J. W. Burdick, “Parallel formulation of the inverse kinematics of modular hyper-redundant manipulators,” Proc. 1991 IEEE Int. Conf. on Robotics and Automation, pp. 708-713, 1991.
- [20] G. S. Chirikjian, “A general numerical method for hyper-redundant manipulator inverse kinematics,” 1993 Proc. IEEE Int. Conf. on Robotics and Automation, pp. 107-112, 1993. https://doi.org/10.1109/ROBOT.1993.291863
- [21] I. I. Dikin, “Iterative solution of problems of linear and quadratic programming,” Soviet Math. Dokl., Vol.8, pp. 674-675, 1967.
- [22] A. V. Fiacco and G. P. McCormik, “Nonlinear Programming – Sequential Unconstrained Minimization Technique,” John Wiley & Sons Ltd., 1968.
- [23] N. Karmarkar, “A new polynomial-time algorithm for linear programming,” Proc. of the Sixteenth Annual ACM Symp. on Theory of Computing, (STOC ’84), pp. 302-311, 1984. https://doi.org/10.1145/800057.808695
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.