Paper:
Active Inclination Modification for Snake Robots in Environments Including a Plane with Varying Inclination Angle
Shunta Suyama*
 , Mizuki Nakajima**
, and Motoyasu Tanaka*
, Mizuki Nakajima**
, and Motoyasu Tanaka*
*The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan
**Tokyo Denki University
5 Senju Asahi-cho, Adachi-ku, Tokyo 120-8551, Japan

This study proposes a novel approach for a snake robot traversing an environment composed of two planes, one fixed and the other varying in inclination. Instead of adapting to the environment, the robot propels itself by deliberately changing the environment into a form that facilitates mobility. Assuming that the robot straddles two planes, the inclination of the planes is changed by controlling the motion of the part that straddles them. The proposed method changes the inclination only through movement of the robot, which straddles the planes. Therefore, other body parts can be used in conjunction with other motions using conventional methods. The effectiveness of the proposed method and its limitations were verified through physical simulations. The simulation results confirmed that the snake robot can modify the inclination of the plane if its posture is suitable for modifying the environment.
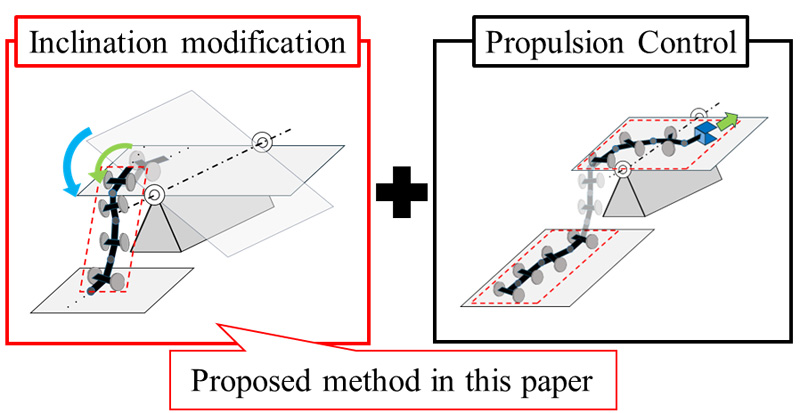
Inclination modification for snake robots
- [1] łabelPrautsch_heimen P. Prautsch, T. Mita, and T. Iwasaki, “Analysis and control of a gait of snake robot,” IEEJ Trans. on Industry Applications, Vol.120, Issue 3, pp. 372-381, 2000. https://doi.org/10.1541/ieejias.120.372
- [2] łabelMatsuno_heimen F. Matsuno and K. Suenaga, “Control of Redundant 3D Snake Robot Based on Kinematic Model,” IEEE Int. Conf. on Robotics and Automation, pp. 2061-2066, 2003. https://doi.org/10.1109/ROBOT.2003.1241897
- [3] łabelYamakita_heimen M. Yamakita, M. Hashimoto, and T. Yamada, “Control of locomotion and head configuration of 3D snake robot,” J. of Robotics Society of Japan, Vol.22, Issue 1, pp. 61-67, 2004 (in Japanese). https://doi.org/10.7210/jrsj.22.61
- [4] łabelTanaka_heimen M. Tanaka, K. Kon, and K. Tanaka, “Range-sensor-based Semiautonomous Whole-body Collision Avoidance of a Snake Robot,” IEEE Trans. on Control Systems Technology, Vol.23, Issue 5, pp. 1927-1934, 2015. https://doi.org/10.1109/TCST.2014.2382578
- [5] łabelMatsuno_heimen2 F. Matsuno and K. Mogi, “Redundancy Controllable System and Control of Snake Robot with Redundancy Based on Kinematic Model,” Proc. of the 39th IEEE Int. Conf. on Decision and Control, pp. 4791-4796, 2000. https://doi.org/10.1109/CDC.2001.914686
- [6] łabelKon_step K. Kon, M. Tanaka, and K. Tanaka, “Mixed integer programming-based semiautonomous step climbing of a snake robot considering sensing strategy,” IEEE Trans. on Control Systems Technology, Vol.24, Issue 1, pp. 252-264, 2015. https://doi.org/10.1109/TCST.2015.2429615
- [7] łabelmotoyasu_step M. Tanaka and K. Tanaka, “Control of a snake robot for ascending and descending steps,” IEEE Trans. on Robotics, Vol.31, Issue 2, pp. 511-520, 2015. https://doi.org/10.1109/TRO.2015.2400655
- [8] łabelcompla_step Q. Fu and C. Li, “Robotic modelling of snake traversing large, smooth obstacles reveals stability benefits of body compliance,” Royal Society Open Science, Vol.7, No.2, Article No.191192, 2020. https://doi.org/10.1098/rsos.191192
- [9] łabelnakajima_step M. Nakajima, M. Tanaka, K. Tanaka, and F. Matsuno, “Motion control of a snake robot moving between two non-parallel planes,” Advanced Robotics, Vol.32, Issue 10, pp. 559-573, 2018. https://doi.org/10.1080/01691864.2018.1458653
- [10] łabelnakajima_step2 M. Nakajima and M. Tanaka, “Motion control of a snake robot on multiple inclined planes,” Advanced Robotics, Vol.38, Issue 11, pp. 784-800, 2024. https://doi.org/10.1080/01691864.2024.2345656
- [11] łabelsuyama_step S. Suyama, M. Nakajima, H. Arita, and M. Tanaka, “Control of a snake robot with proximity sensors to adapt for two variable planes,” IEEE Access, Vol.12, pp. 46864-46880, 2024. https://doi.org/10.1109/ACCESS.2024.3382205
- [12] łabelstep_Lipkin K. Lipkin, I. Brown, A. Peck, H. Choset, J. Rembisz, P. Gianfortoni, and A. Naaktgeboren, “Differentiable and piecewise differentiable gaits for snake robots,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1864-1869, 2007. https://doi.org/10.1109/IROS.2007.4399638
- [13] łabelTakemori_crawler T. Takemori, M. Tanaka, and F. Matuno, “Gait design for a snake robot by connecting curve segments and experimental demonstration,” IEEE Trans. on Robotics, Vol.34, Issue 5, pp. 1384-1391, 2018. https://doi.org/10.1109/TRO.2018.2830346
- [14] łabelSnake_rope R. Watanabe and M. Tanaka, “Principle of Object Supported by Rope Deformation and its Application to Rope Climbing by Snake Robot,” Advanced Robotics, Vol.37, Issue 9, pp. 591-602, 2023. https://doi.org/10.1080/01691864.2023.2170189
- [15] łabeladd_temp T. Hada, K. Iguchi, and T. Aoki, “Development of Flexible Deformation Mobile Robot Composed of Multiple Units and Pneumatic Self-Excited Valve,” J. Robot. Mechatron., Vol.34, No.2, pp. 478-485, 2022. https://doi.org/10.20965/jrm.2022.p0478
- [16] łabelgrass_snake J. Bae, M. Kim, B. Song, M. Jin, and D. Yun, “Snake robot with driving assistant mechanism,” Applied Sciences, Vol.10, Issue 21, Article No.7478, 2020. https://doi.org/10.3390/app10217478
- [17] łabelYamada_renzoku H. Yamada and S. Hirose, “Study of Active Cord Mechanism – Approximations to Continuous Curves of a Multi-joint Body,” The Robotics Society of Japan, Vol.26, No.1, pp. 110-120, 2008 (in Japanese),
- [18] łabelnoudou_dansa L. Pfotzer, M. Staehler, A. Hermann, A. Roennau, and R. Dillmann, “KAIRO 3: Moving Over Stairs & Unknown Obstacles with Reconfigurable Snake-Like Robots,” European Conf. on Mobile Robots, 2015. https://doi.org/10.1109/ECMR.2015.7324209
- [19] łabelnoudou_rough K. Kouno, H. Yamada, and S. Hirose, “Development of Active-Joint Active-Wheel High Traversability Snake-Like Robot ACM-R4.2,” J. Robot. Mechatron., Vol.25, No.3, pp. 559-566, 2013. https://doi.org/10.20965/jrm.2013.p0559
- [20] łabelleg_hard X. Liang, M. Xu, L. Xu, P. Liu, X. Ren, Z. Kong, J. Yang, and S. Zhang, “The AmphiHex: A novel amphibious robot with transformable leg-flipper composite propulsion mechanism,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3667-3672, 2012. https://doi.org/10.1109/IROS.2012.6386238
- [21] łabelleg_nonsense T. Matsuzawa, A. Koizumi, K. Hashimoto, X. Sun, S. Hamamoto, T. Teramachi, S. Kimura, N. Sakai, and A. Takanishi, “Crawling gait for four-limbed robot and simulation on uneven terrain,” IEEE-RAS 16th Int. Conf. on Humanoid Robots, pp. 1270-1275, 2016. https://doi.org/10.1109/HUMANOIDS.2016.7803433
- [22] łabelleg_sense H.-M. Joe and J.-H. Oh, “A robust balance-control framework for the terrain-blind bipedal walking of a humanoid robot on unknown and uneven terrain,” Sensors, Vol.19, Issue 19, Article No.4194, 2019. https://doi.org/10.3390/s19194194
- [23] łabelWheel_hard Y. She, C. J. Hurd, and H.-J. Su, “A transformable wheel robot with a passive leg,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4165-4170, 2015. https://doi.org/10.1109/IROS.2015.7353966
- [24] łabelwheel_sense K. Iagnemma, A. Rzepniewski, S. Dubowsky, and P. Schenker, “Control of robotic vehicles with actively articulated suspensions in rough terrain,” Autonomous Robots, Vol.14, pp. 5-16, 2003. https://doi.org/10.1023/A:1020962718637
- [25] łabelCrawler_sense1 K. Ohno, S. Morimura, S. Tadokoro, E. Koyanagi, and T. Yoshida, “Semi-autonomous control system of rescue crawler robot having flippers for getting over unknown-steps,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3012-3018, 2007. https://doi.org/10.1109/IROS.2007.4399271
- [26] łabelCrawler_sense2 E. Rohmer, K. Ohno, T. Yoshida, K. Nagatani, E. Konayagi, and S. Tadokoro, “Integration of a sub-crawlers’ autonomous control in Quince highly mobile rescue robot,” IEEE/SICE Int. Symp. on System Integration, pp. 78-83, 2010. https://doi.org/10.1109/SII.2010.5708305
- [27] łabelcoppeliaSim_2013 E. Rohmer, S. P. N. Singh, and M. Freese, “CoppeliaSim (formerly V-REP): A Versatile and Scalable Robot Simulation Framework,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1321-1326, 2013. https://doi.org/10.1109/IROS.2013.6696520
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.