Paper:
Development of Snake-Like Robot for Cable-Laying —Motion Design for Locomotion over Cable Racks and Ceiling Spaces
Yuki Sadasue, Hayato Nagae, Jyunta Takarabe, and Masami Iwase
Department of Robotics and Mechatronics, Tokyo Denki University
5 Senju Asahi-cho, Adachi-ku, Tokyo 120-8551, Japan

The purpose of this study is to develop a snake-like robot for cable laying. Cable laying is one of the tasks that inevitably occur in construction work. Cable laying is generally performed manually by workers in high and narrow spaces, such as cable racks installed in ceilings and ceiling spaces. Therefore, it involves significant risks, such as falls. To ensure worker safety and enable anyone to perform the task, automation and labor-saving through robots are anticipated. Therefore, this study aims to develop a snake-like robot that pulls a lead cable through traveling wave inspired by workers’ cable-laying actions. We verify whether this traveling wave can achieve propulsion in different environments, such as flat surfaces, cable racks, and ceiling spaces, through simulations and real-world experiments. The simulation and experiment results confirm that the traveling wave is effective for propulsion in cable racks and ceiling spaces. Based on these results, it was required to keep the head horizontal to the ground even during traveling wave to allow environmental inspection using a camera mounted on the snake-like robot’s head. Therefore, we established a method to achieve propulsion with traveling wave while maintaining the head’s horizontal position using Fourier series expansion. By implementing this, we achieved propulsion with reduced head oscillation.
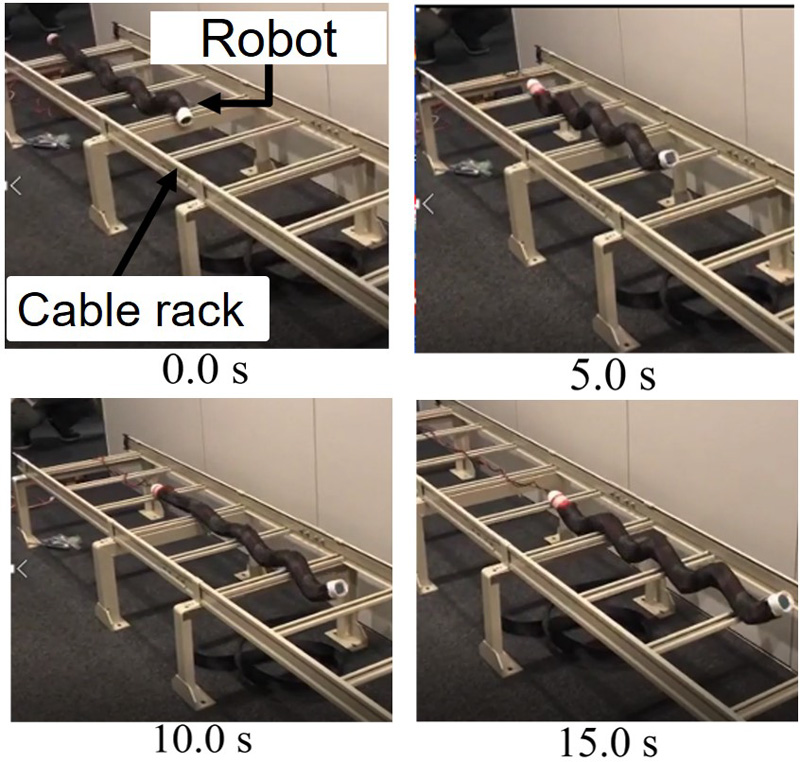
Snake-like robot propulsion on the cable rack
- [1] KANDENKO Corp., “Introduction of the ceiling wiring robot ‘rakuraku toru-kun neo’,” DenSetsu Technology Special Issue, Vol.3, pp. 81-106, 2024 (in Japanese).
- [2] S. Hirose, “Biomechanical engineering: Basic principles and applications of soft robots,” Kogyo Chosakai Publishing, 1987 (in Japanese).
- [3] S. Hirose, “Machine design of mobile snake-like robots,” J. of the Robotics Society of Japan, Vol.28, Issue 2, pp. 151-155, 2010 (in Japanese). https://doi.org/10.7210/jrsj.28.151
- [4] J. Liu, Y. Tong, and J. Liu, “Review of snake robots in constrained environments,” Robotics and Autonomous Systems, Vol.141, Article No.103785, 2021. https://doi.org/10.1016/j.robot.2021.103785
- [5] T. Maruyama, M. Iwase, and S. Hatakeyama, “A design and control of a snake-like robot using projection method,” Proc. of the SICE Annual Conf., Vol.47, pp. 213-213, 2004.
- [6] M. Mori, H. Yamada, and S. Hirose, “Design and development of active cord mechanism “ACM-R3” and its 3-dimensional locomotion control,” J. of the Robotics Society of Japan, Vol.23, Issue 7, pp. 886-897, 2005 (in Japanese). https://doi.org/10.7210/jrsj.23.886
- [7] M. Yamakita, M. Hashimoto, and T. Yamada, “Control of locomotion and head configuration for 3D snake robot,” J. of the Robotics Society of Japan, Vol.22, Issue 1, pp. 61-67, 2004. https://doi.org/10.7210/jrsj.22.61
- [8] F. Kasahara, T. Yanagida, K. Onodera, and M. Iwase, “Modeling and locomotion control using SDRE of snake-like robot considering side-slip,” Trans. of the JSST, Vol.10, No.1, pp. 35-45, 2018.
- [9] H. Marvi, C. Gong, N. Gravish, H. Astley, M. Travers, R. L. Hatton, J. R. Mendelson, H. Choset, D. L. Hu, and D. I. Goldman, “Sidewinding with minimal slip: Snake and robot ascent of sandy slopes,” Science, Vol.346, Issue 6206, pp. 224-229, 2014. https://doi.org/10.1126/science.1255718
- [10] T. Tate and H. Tsukagoshi, “Fluid powered soft cord robot aiming to move in the sand,” Proc. of the JSME annual Conf. on Robotics and Mechatronics, Vol.2016, Article No.2A1-04b2, 2016 (in Japanese). http://dx.doi.org/10.1299/jsmermd.2016.2A1-04b2
- [11] Z. Zuo, Z. Wang, B. Li, and S. Ma, “Serpentine locomotion of a snake-like robot in water environment,” 2008 IEEE Int. Conf. on Robotics and Biomimetics, pp. 25-30, 2009. https://doi.org/10.1109/ROBIO.2009.4912974
- [12] A. Crespi and A. J. Ijspeert, “Online optimization of swimming and crawling in an amphibious snake robot,” IEEE Trans. on Robotics, Vol.24, Issue 1, pp. 75-87, 2008. https://doi.org/10.1109/TRO.2008.915426
- [13] E. Kelasidi, P. Liljeback, K. Y. Pettersen, and J. T. Gravdahl, “Innovation in underwater robots: Biologically inspired swimming snake robots,” IEEE Robotics and Automation Magazine, Vol.23, Issue 1, pp. 44-62, 2016. https://doi.org/10.1109/MRA.2015.2506121
- [14] K. Ito, S. Kuroe, and T. Kobayashi, “Abstraction of state-action space utilizing properties of the body and the environment – Application to a 3-dimensional snake-like robot that operates on rubble,” 2012 6th IEEE Int. Conf. Intelligent Systems, pp. 114-120, 2012. https://doi.org/10.1109/IS.2012.6335200
- [15] K. Kouno, H. Yamada, and S. Hirose, “Development of active-joint active-wheel high traversability snake-like robot ACM-R4.2,” J. Robot. Mechatron., Vol.25, No.3, pp. 559-566, 2013. https://doi.org/10.20965/jrm.2013.p0559
- [16] T. Takemori, M. Tanaka, and F. Matsuno, “Ladder climbing with a snake robot,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2018. https://doi.org/10.1109/IROS.2018.8594411
- [17] M. Tanaka, M. Nakajima, Y. Suzuki, and K. Tanaka, “Development and control of articulated mobile robot for climbing steep stairs,” IEEE/ASME Trans. on Mechatronics, Vol.23, Issue 2, pp. 531-541, 2018. https://doi.org/10.1109/TMECH.2018.2792013
- [18] M. Tanaka, K. Kon, M. Nakajima, N. Matsumoto, S. Fukumura, K. Fukui, H. Sawabe, M. Fujita, and K. Tadakuma, “Development and field test of the articulated mobile robot T2 Snake-4 for plant disaster prevention,” Advanced Robotics, Vol.34, Issue 2, pp. 70-88, 2020. https://doi.org/10.1080/01691864.2019.1680316
- [19] R. Watanabe and M. Tanaka, “Principle of object support by rope deformation and its application to rope climbing by snake robot,” Advanced Robotics, Vol.37, Issue 9, pp. 591-602, 2023. https://doi.org/10.1080/01691864.2023.2170189
- [20] T. Takayama, S. Hirose, and M. Arai, “Development of “Souryu-III”: connected crawler vehicle for inspection of narrow and winding space,” Proc. of the Robotics and Mechatronics Conf., Vol.2003, p. 100, 2003 (in Japanese). https://doi.org/10.1299/jsmermd.2003.100_1
- [21] Q. Fu and C. Li, “Contact feedback helps snake robots propel against uneven terrain using vertical bending,” Bioinspiration & Biomimetics, Vol.18, No.5, Article No.056002, 2023. https://doi.org/10.1088/1748-3190/ace672
- [22] H. Suhara, T. Kamegawa, and A. Gofuku, “Realization of a snake robot that passes through inside of bent pipe connected with straight pipes by helical rolling motion,” Proc. of the Robotics and Mechatronics Conf., Vol.2016, Article No.1A1-09b5, 2016 (in Japanese).
- [23] K. Ito, R. Murai, and K. Nakamichi, “Development of snake-like rescue robot designed for ease of use,” J. of the Robotics Society of Japan, Vol.27, No.4, pp. 419-426, 2009. https://doi.org/10.7210/jrsj.27.419
- [24] H. Sawabe, M. Nakajima, M. Tanaka, K. Tanaka, and F. Matsuno, “Control of an articulated wheeled mobile robot in pipes,” Advanced Robotics, Vol.33, No.20, pp. 1072-1086, 2019. https://doi.org/10.1080/01691864.2019.1666737
- [25] S. Han, S. Chon, J. Y. Kim, J. Seo, D. G. Shin, S. Park, J. T. Kim, J. Kim, M. Jin, and J. Cho, “Snake robot gripper module for search and rescue in narrow spaces,” IEEE Robotics and Automation Letters, Vol.7, Issue 2, pp. 1667-1673, 2022. https://doi.org/10.1109/LRA.2022.3140812
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.