Paper:
Knot Tying, Hanging, and Transporting Motions of Snake Robots by Utilizing Half-Hitch Knot
Yuki Ishikawa*, Mizuki Nakajima**
 , and Motoyasu Tanaka*
, and Motoyasu Tanaka*
*The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan
**Tokyo Denki University
5 Senju Asahi-cho, Adachi-ku, Tokyo 120-8551, Japan

This paper proposes a hanging motion for snake robots by utilizing half-hitch knot tying, which is a type of rope work. The proposed method prevents a robot from falling off a pipe by tying it to the pipe. In addition, the robot can hang from a pipe by grasping it using the knotting part. The parts other than the knotting part can be operated arbitrarily and applied to various actions. We propose a transporting motion as one of the applications of the hanging motion. The effectiveness of the proposed motion was experimentally verified using an actual robot.
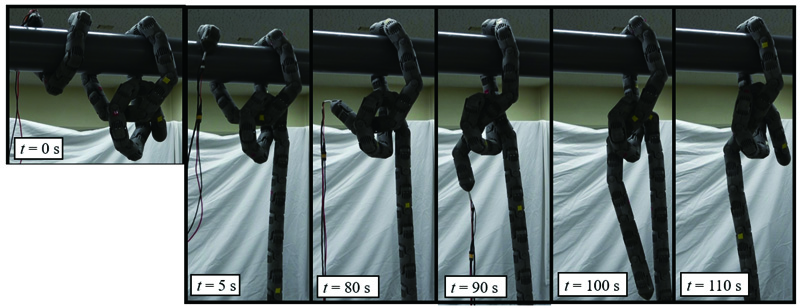
Hanging motion by utilizing half-hitch knot
- [1] S. Hirose and M. Mori, “Biologically inspired snake-like robots,” 2004 IEEE Int. Conf. on Robotics and Biomimetics, 2004. https://doi.org/10.1109/ROBIO.2004.1521742
- [2] R. Ariizumi and F. Matsuno, “Dynamical analysis of sidewinding locomotion by a snake-like robot,” 2013 IEEE Int. Conf. on Robotics and Automation, pp. 5149-5154, 2013. https://doi.org/10.1109/ICRA.2013.6631313
- [3] K. Melo, “Modular snake robot velocity for side-winding gaits,” 2015 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3716-3722, 2015. https://doi.org/10.1109/ICRA.2015.7139715
- [4] H. Marvi and D. L. Hu, “Friction enhancement in concertina locomotion of snakes,” J. of the Royal Society Interface, Vol.9, Issue 36, pp. 3067-3080, 2012. https://doi.org/10.1098/rsif.2012.0132
- [5] A. Akbarzadeh, J. Safehian, and H. Kalani, “Generating snake robot concertina locomotion using a new dynamical curve,” Int. J. of Modeling and Optimization, Vol.1, No.2, pp. 134-140, 2011. https://doi.org/10.7763/IJMO.2011.V1.24
- [6] M. Tanaka and K. Tanaka, “Control of a Snake Robot for Ascending and Descending Steps,” IEEE Trans. on Robotics, Vol.31, Issue 2, pp. 511-520, 2015. https://doi.org/10.1109/TRO.2015.2400655
- [7] K. Kouno, H. Yamada, and S. Hirose, “Development of active-joint active-wheel high traversability snake-like robot ACM-R4.2,” J. Robot. Mechatron., Vol.25, No.3, pp. 559-566, 2013. https://doi.org/10.20965/jrm.2019.p0772
- [8] M. Tanaka, M. Nakajima, Y. Suzuki, and K. Tanaka, “Development and control of articulated mobile robot for climbing steep stairs,” IEEE/ASME Trans. on Mechatronics, Vol.23, No.2, pp. 531-541, 2018. https://doi.org/10.1109/TMECH.2018.2792013
- [9] T. Takemori, M. Tanaka, and F. Matsuno, “Hoop-passing motion for a snake robot to realize motion transition across different environments,” IEEE Trans. on Robotics, Vol.37, No.5, pp. 1696-1711, 2021. https://doi.org/10.1109/TRO.2021.3063438
- [10] T. Takanashi, M. Nakajima, T. Takemori, and M. Tanaka, “Obstacle-aided locomotion of a snake robot using piecewise helixes,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 10542-10549, 2022. https://doi.org/10.1109/LRA.2022.3194689
- [11] T. Takemori, M. Tanaka, and F. Matsuno, “Ladder climbing with a snake robot,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 8140-8145, 2018. https://doi.org/10.1109/IROS.2018.8594411
- [12] R. Watanabe and M. Tanaka, “Principle of object support by rope deformation and its application to rope climbing by snake robot,” Advanced Robotics, Vol.37, No.9, pp. 591-602, 2023. https://doi.org/10.1080/01691864.2023.2170189
- [13] Z. Zuo, Z. Wang, B. Li, and S. Ma, “Serpentine locomotion of a snake-like robot in water environment,” 2008 IEEE Int. Conf. on Robotics and Biomimetics, pp. 25-30, 2009. https://doi.org/10.1109/ROBIO.2009.4912974
- [14] T. Kamegawa, T. Harada, and A. Gofuku, “Realization of cylinder climbing locomotion with helical form by a snake robot with passive wheels,” 2009 IEEE Int. Conf. on Robotics and Automation, pp. 3067-3072, 2009. https://doi.org/10.1109/ROBOT.2009.5152862
- [15] T. Kamegawa, T. Harada, and A. Gofuku, “V-shift control for snake robot moving the inside of a pipe with helical rolling motion,” 2011 IEEE Int. Symposium on Safety, Security and Rescue Robotics, 2011. https://doi.org/10.1109/SSRR.2011.6106789
- [16] C. Tang, X. Shu, D. Meng, and G. Zhou, “Arboreal concertina locomotion of snake robots on cylinders,” Int. J. of Advanced Robotic Systems, Vol.14, No.6, 2017. https://doi.org/10.1177/1729881417748440
- [17] J. C. McKenna, D. J. Anhalt, F. M. Bronson, H. B. Brown, M. Schwerin, E. Shammas, and H. Choset, “Toroidal skin drive for snake robot locomotion,” 2008 IEEE Int. Conf. on Robotics and Automation, pp. 1150-1155, 2008. https://doi.org/10.1109/ROBOT.2008.4543359
- [18] łabelRef:Takemori3 T. Takemori, M. Tanaka, and F. Matsuno, “Adaptive helical rolling of a snake robot to a straight pipe with irregular cross-sectional shape,” IEEE Trans. on Robotics, Vol.39, No.1, pp. 437-451, 2023. https://doi.org/10.1109/TRO.2022.3189224
- [19] W. Qi, T. Kamegawa, and A. Gofuku, “Proposal of helical wave propagate motion for a snake robot to across a branch on a pipe,” 2016 IEEE/SICE Int. Symposium on System Integration (SII), pp. 821-826, 2016. https://doi.org/10.1109/SII.2016.7844101
- [20] T. Takemori, M. Tanaka, and F. Matsuno, “Gait design for a snake robot by connecting curve segments and experimental demonstration,” IEEE Trans. on Robotics, Vol.34, No.5, pp. 1384-1391, 2018. https://doi.org/10.1109/TRO.2018.2830346
- [21] Y. Wang, T. Kamegawa, E. Matsuda, and A. Gofuku, “Motion planning of a snake robot that moves in crowded pipes,” Advanced Robotics. Vol.36, No.16, pp. 781-793, 2022. https://doi.org/10.1080/01691864.2022.2095225
- [22] B. A. Elsayed, T. Takemori, M. Tanaka, and F. Matsuno, “Mobile manipulation using a snake robot in a helical gait,” IEEE/ASME Trans. on Mechatronics, Vol.27, No.5, pp. 2600-2611, 2022. https://doi.org/10.1109/TMECH.2021.3114168
- [23] S. Hirose and H. Yamada, “Study of active cord mechanism—Approximations to continuous curves of a multi-joint body—,” The Robotics Society of Japan, Vol.26, No.1, pp. 110-120, 2008 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.