Paper:
Tension-Adaptive Body Shape Control of a Snake Robot for Rope Climbing by Current Feedback
Ryosuke Kobayashi, Ching Wen Chin
 , and Motoyasu Tanaka
, and Motoyasu Tanaka
The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan

In this paper, we propose a control method for the snake robot to adapt its body shape to the rope tension while climbing a rope, which is a flexible environment, in response to the joints’ current. The frictional force and the robot joint load vary depending on the amount of rope tension. A large tension may overload the robot joints, but a small tension may cause the robot slip and fall. Therefore, it is important for the robot to be able to change its body shape and adapt appropriately to the tension in rope climbing. In order to achieve this, we focused on the fact that joint loads and motor current values are related and devised a control system to change the robot’s body shape according to the motor current values. The concept is to change the robot’s body shape in order to obtain the maximum twisting angle at a constant current value. It should be noted that this control cannot guarantee that the robot will not slip and fall, but it can avoid excessive joint loading. The efficacy of this control for tension adaptation was validated through experiment.
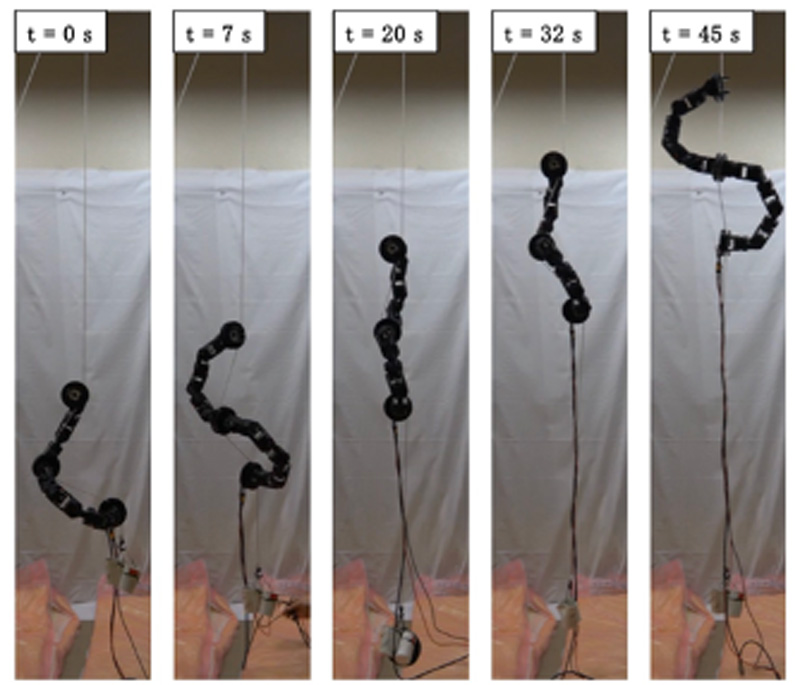
Adapting to the tension in rope climbing
- [1] S. Deepa Nivethika, T. Nivethetha, P. Priyadharshini, V. T. Nithyasri, M. SenthilPandian, and R. Sivaprasad, “Design and Development of Pipe inspection Snake Locomotion Robot,” 2022 Int. Conf. on Power, Energy, Control and Transmission Systems (ICPECTS), 2022. https://doi.org/10.1109/ICPECTS56089.2022.10047028
- [2] H. Tanihira, M. Nakajima, and M. Tanaka, “Feedback control of a pipe cleaning snake robot with two helixes connected,” Advanced Robotics, Vol.38, No.2, pp. 63-81, 2024. https://doi.org/10.1080/01691864.2023.2299844
- [3] Y. Wang, T. Kamegawa, E. Matsuda, and A. Gofuku, “Motion planning of a snake robot that moves in crowded pipes,” Advanced Robotics, Vol.36, No.16, pp. 781-793, 2022. https://doi.org/10.1080/01691864.2022.2095225
- [4] H. Shin, K.-M. Jeong, and J.-J. Kwon, “Development of a snake robot moving in a small diameter pipe,” ICCAS 2010, pp. 1826-1829, 2010. https://doi.org/10.1109/ICCAS.2010.5669881
- [5] T. Takemori, M. Tanaka, and F. Matsuno, “Ladder Climbing with a Snake Robot,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 8140-8145, 2018. https://doi.org/10.1109/IROS.2018.8594411
- [6] D. Sahu, R. Kodi, and S. Singh, “Gait Analysis of Multi-Step Climbing Active Wheeled Snake Robot,” 2019 4th Int. Conf. on Robotics and Automation Engineering (ICRAE), pp. 18-23, 2019. https://doi.org/10.1109/ICRAE48301.2019.9043828
- [7] W. J. Stronge and M. Thomas, “Effectiveness of mountaineering manual belay/abseil devices,” Sports Eng., Vol.17, No.3, pp. 131-142, 2014. https://doi.org/10.1007/s12283-013-0147-6
- [8] K. H. Cho, Y. H. Jin, H. M. Kim, H. Moon, J. C. Koo, and H. R. Choi, “Caterpillar-based cable climbing robot for inspection of suspension bridge hanger rope,” 2013 IEEE Int. Conf. on Automation Science and Engineering (CASE), pp. 1059-1062, 2013. https://doi.org/10.1109/CoASE.2013.6653913
- [9] F. Y. Xu, X. S. Wang, and P. P. Cao, “Design and Application of a New Wheel-Based Cable Inspection Robot,” IEEE Int. Conf. on Robotics and Automation, pp. 4909-4914, 2011. https://doi.org/10.1109/ICRA.2011.5979820
- [10] N. Kaya, M. Iwashita, S. Nakasuka, L. Summerer, and J. Mankins, “Crawling robots on large web in rocket experiment on furoshiki development,” 55th Int. Astronautical Congress, 2004.
- [11] S. Urankar, P. Jain, A. Singh, A. Saxena, and B. Dasgupta, “Robo-Sloth: A Rope-Climbing Robot,” Department of Mechanical Engineering Indian Institute of Technology, 2003.
- [12] J. Nakanishi, T. Fukuda, and D. E. Koditschek, “A brachiating robot controller,” IEEE Trans. on Robotics and Automation, Vol.16, No.2, pp. 109-123, 2000. https://doi.org/10.1109/70.843166
- [13] N. D. Hewapathirana, L. Uddawatta, J. P. Karunadasa, and T. Nanayakkara, “Analysis on four legged multipurpose rope climbing robot,” 4th Int. Conf. on Industrial and Information Systems (ICIIS), pp. 505-510, 2009. https://doi.org/10.1109/ICIINFS.2009.5429810
- [14] N. Ranasinghe, J. Everist, and W. M. Shen, “Modular robot climbers,” Proc. 2006 IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems, 2007.
- [15] R. Watanabe and M. Tanaka, “Principle of object support by Rope deformation and its application to Rope climbing by snake robot,” Advanced Robotics, Vol.37, No.9, pp. 591-602, 2023. https://doi.org/10.1080/01691864.2023.2170189
- [16] S. Ma, F. Qin, S. Chen, L. Li, J. Wang, Z. Wang, S. Li, and X. Xiao, “Self-adaptive rolling motion for snake robots in unstructured environments based on torque control,” Biomimetic Intelligence and Robotics, Vol.3, No.3, Article No.100117, 2023. https://doi.org/10.1016/j.birob.2023.100117
- [17] T. Takemori, M. Tanaka, and F. Matsuno, “Adaptive Helical Rolling of a Snake Robot to a Straight Pipe With Irregular Cross-Sectional Shape,” IEEE Trans. on Robotics, Vol.39, No.1, pp. 437-451, 2023. https://doi.org/10.1109/TRO.2022.3189224
- [18] K. Touda, M. Goio, N. Hanajima, Y. Fujihira, and M. Mizukami, “Measurement of rope tension in a lifting machine using a winch for high place inspection,” J. Robot. Soc. Japan, Hokkaido Branch 56th Lecture, Vol.56, pp. 93-94, 2018 (in Japanese). https://doi.org/10.1299/jsmehokkaido.2018.56.413
- [19] H. Yamada and S. Hirose, “Study of active cord mechanism: Approximations to continuous curves of a multijoint body,” J. Robot. Soc. Japan, Vol.26, No.1, pp. 110-120, 2008 (in Japanese). https://doi.org/10.7210/jrsj.26.110
- [20] T. Takemori, M. Tanaka, and F. Matsuno, “Gait Design for a Snake Robot by Connecting Curve Segments and Experimental Demonstration,” IEEE Trans. on Robotics, Vol.34, No.5, pp. 1384-1391, 2018. https://doi.org/10.1109/TRO.2018.2830346
- [21] L. Euler, “Remarques sur l’effet du frottement dans l’equilibre,” Mem Acad Sci De Berlin, Vol.18, pp. 265-278, 1769.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.