Paper:
Semi-Autonomous Stair Climbing Control for an Articulated Mobile Robot by Propagating a Single Backward Wave
Mizuki Nakajima*
 , Kosuke Fukui**, and Motoyasu Tanaka**
, Kosuke Fukui**, and Motoyasu Tanaka**
*Tokyo Denki University
5 Senju Asahi-cho, Adachi, Tokyo 120-8551, Japan
**The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan

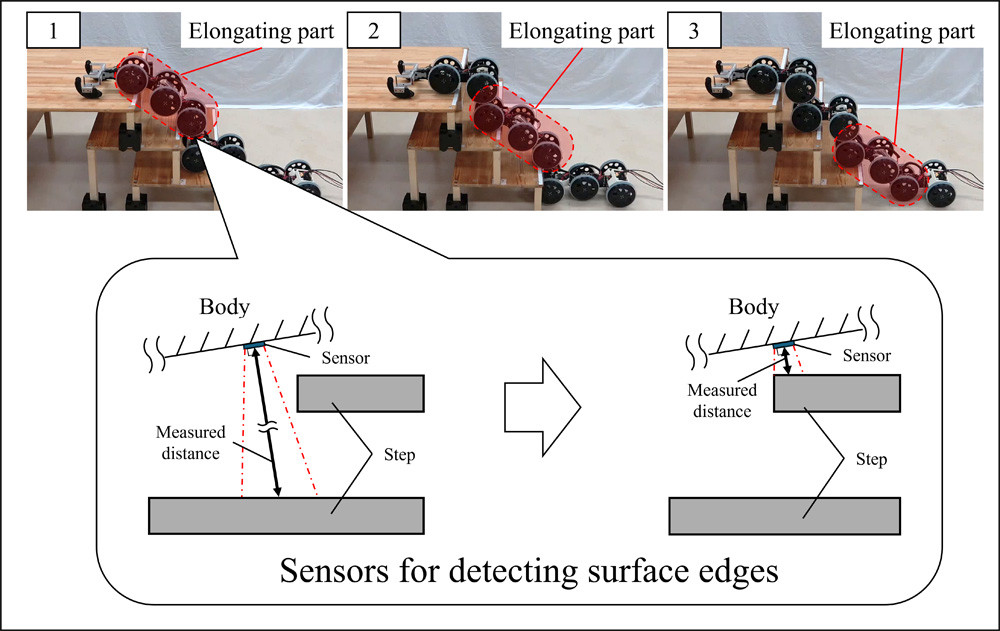
This paper proposes a control method for semi-autonomous stair climbing using an articulated mobile robot. Stair-climbing motion is achieved by propagating a single backward wave along the body of the robot. The robot moves forward by shifting a part of the body lifted from the step (the elongating part) from front to back. Semi-autonomous stair climbing is accomplished by automatically determining when to shift the elongating part backward based on the relative position between the step and the robot. Furthermore, we developed an actual robot that can measure the relative position between itself and the environment to climb stairs semi-autonomously. The developed robot is equipped with several short-range sensors on the lower part of its body, which can measure the relative distance between the robot and the stair tread surface. The effectiveness of the proposed control method was verified by simulations using a physics simulator and by experiments with the developed robot.
Semi-autonomous stair climbing control
- [1] G. Granosik, “Hypermobile robots – the Survey,” J. of Intelligent & Robotic Systems, Vol.75, No.1, pp. 147-169, 2014. https://doi.org/10.1007/s10846-013-9985-5
- [2] M. Arai, Y. Tanaka, S. Hirose, H. Kuwahara, and S. Tsukui, “Development of “Souryu-IV” and “Souryu-V:” Serially connected crawler vehicles for in-rubble searching operations,” J. of Field Robotics, Vol.25, Issues 1-2, pp. 31-65, 2008. https://doi.org/10.1002/rob.20229
- [3] L. Pfotzer, S. Klemm, A. Roennau, J. M. Zöllner, and R. Dillmann, “Autonomous navigation for reconfigurable snake-like robots in challenging, unknown environments,” Robotics and Autonomous Systems, Vol.89, pp. 123-135, 2017. https://doi.org/10.1016/j.robot.2016.11.010
- [4] H. Miyanaka, N. Wada, T. Kamegawa, N. Sato, S. Tsukui, H. Igarashi, and F. Matsuno, “Development of an unit type robot “KOHGA2” with stuck avoidance ability,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 3877-3882, 2007. https://doi.org/10.1109/ROBOT.2007.364073
- [5] N. Takahashi and K. Nonaka, “Model predictive leg configuration control for leg/wheel mobile robots that adapts to changes in ground level,” J. Robot. Mechatron., Vol.35, No.1, pp. 160-170, 2023. https://doi.org/10.20965/jrm.2023.p0160
- [6] N. Igo, S. Yamaguchi, N. Kimura, K. Ueda, K. Iseya, K. Kobayashi, T. Tomura, S. Mitsui, and T. Satake, “Robots climbing up and down a steep stairs and robots retrieving objects from high places,” J. Robot. Mechatron., Vol.34, No.3, pp. 509-522, 2022. https://doi.org/10.20965/jrm.2022.p0509
- [7] S. Hirose, A. Morishima, S. Tukagosi, T. Tsumaki, and H. Monobe, “Design of practical snake vehicle: Articulated body mobile robot KR-II,” Proc. of 5th Int. Conf. on Advanced Robotics: Robots in Unstructured Environments, pp. 833-838, 1991. https://doi.org/10.1109/ICAR.1991.240571
- [8] H. Komura, H. Yamada, and S. Hirose, “Development of snake-like robot ACM-R8 with large and mono-tread wheel,” Advanced Robotics, Vol.29, Issue 17, pp. 1081-1094, 2015. https://doi.org/10.1080/01691864.2014.971054
- [9] D. Endo, A. Watanabe, and K. Nagatani, “Stair climbing control of 4-degrees-of-freedom tracked vehicle based on internal sensors,” 2016 IEEE Int. Symp. on Safety, Security, and Rescue Robotics (SSRR), pp. 112-117, 2016. https://doi.org/10.1109/SSRR.2016.7784286
- [10] N. Li, S. Ma, B. Li, M. Wang, and Y. Wang, “An Online Stair-Climbing Control Method for a Transformable Tracked Robot,” 2012 IEEE Int. Conf. on Robotics and Automation, pp. 923-929, 2012. https://doi.org/10.1109/ICRA.2012.6224819
- [11] M. Vim, S. Homans, and K. Roufas, “Climbing with snake-like robots,” IFAC Proc. Volumes, Vol.34, Issue 4, pp. 7-12, 2001. https://doi.org/10.1016/S1474-6670(17)34265-9
- [12] T. Takemori, M. Tanaka, and F. Matsuno, “Gait Design of a Snake Robot by Connecting Curve Segments and Experimental Demonstration,” IEEE Trans. on Robotics, Vol.34, Issue 5, pp. 1384-1391, 2018. https://doi.org/10.1109/TRO.2018.2830346
- [13] T. Takemori, M. Tanaka, and F. Matsuno, “Gait design of a snake robot by connecting simple shapes,” 2016 IEEE Int. Symp. on Safety, Security and Rescue Robotics (SSRR), pp. 189-194, 2016. https://doi.org/10.1109/SSRR.2016.7784297
- [14] K. Lipkin, I. Brown, A. Peck, H. Choset, J. Rembisz, P. Gianfortoni, and A. Naaktgeboren, “Differentiable and piecewise differentiable gaits for snake robots,” 2007 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1864-1869, 2007. https://doi.org/10.1109/IROS.2007.4399638
- [15] Y. Takita, M. Hasegawa, and M. Nunobiki, “An investigation of climbing up stairs for an inchworm robot,” Advanced Robotics, Vol.15, Issue 2, pp. 245-253, 2001. https://doi.org/10.1163/15685530152116254
- [16] M. Tanaka, M. Nakajima, Y. Suzuki, and K. Tanaka, “Development and Control of Articulated Mobile Robot for Climbing Steep Stairs,” IEEE/ASME Trans. on Mechatronics, Vol.23, Issue 2, pp. 531-541, 2018. https://doi.org/10.1109/TMECH.2018.2792013
- [17] M. Tanaka, K. Kon, M. Nakajima, N. Matsumoto, S. Fukumura, K. Fukui, H. Sawabe, M. Fujita, and K. Tadakuma, “Development and field test of the articulated mobile robot T2 Snake-4 for plant disaster prevention,” Advanced Robotics, Vol.34, Issue 2, pp. 70-88, 2020. https://doi.org/10.1080/01691864.2019.1680316
- [18] G. Li, H. Zhang, F. Herrero-Carrón, H. P. Hildre, and J. Zhang, “A Novel Mechanism for Caterpillar-like Locomotion Using Asymmetric Oscillation,” 2011 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 164-169, 2011. https://doi.org/10.1109/AIM.2011.6027047
- [19] W. Wang, J.-Y. Lee, H. Rodrigue, S.-H. Song, W.-S. Chu, and S.-H. Ahn, “Locomotion of inchworm-inspired robot made of smart soft composite (SSC),” Bioinspiration & Biomimetics, Vol.9, No.4, Article No.046006, 2014. https://doi.org/10.1088/1748-3182/9/4/046006
- [20] H. Fang, Y. Zhang, and K.-W. Wang, “Origami-based earthworm-like locomotion robots,” Bioinspiration & Biomimetics, Vol.12, No.6, Article No.065003, 2017. https://doi.org/10.1088/1748-3190/aa8448
- [21] W. R. Hutchison, B. J. Constantine, J. Borenstein, and J. Pratt, “Development of control for a serpentine robot,” 2007 Int. Symp. on Computational Intelligence in Robotics and Automation, pp. 149-154, 2007. https://doi.org/10.1109/CIRA.2007.382868
- [22] E. Mihankhah, A. Kalantari, E. Aboosaeedan, H. D. Taghirad, S. Ali, and A. Moosavian, “Autonomous Staircase Detection and Stair Climbing for a Tracked Mobile Robot using Fuzzy Controller,” IEEE Int. Conf. on Robotics and Biomimetics, pp. 1980-1985, 2009. https://doi.org/10.1109/ROBIO.2009.4913304
- [23] S. Murakami, M. Shimakawa, K. Kivota, and T. Kato, “Study on stairs detection using RGB-depth images,” 2014 Joint 7th Int. Conf. on Soft Computing and Intelligent Systems (SCIS) and 15th Int. Symp. on Advanced Intelligent Systems (ISIS), pp. 1186-1191, 2014. https://doi.org/10.1109/SCIS-ISIS.2014.7044705
- [24] S. Wang and Y. Tian, “Detecting stairs and pedestrian crosswalks for the blind by RGBD camera,” 2012 IEEE Int. Conf. on Bioinformatics and Biomedicine Workshops, pp. 732-739, 2012. https://doi.org/10.1109/BIBMW.2012.6470227
- [25] P. Ben-Tzvi, S. Ito, and A. A. Goldenberg, “A mobile robot with autonomous climbing and descending of stairs,” Robotica, Vol.27, Issue 2, pp. 171-188, 2009. https://doi.org/10.1017/S0263574708004426
- [26] J. Liu, Y. Wang, S. Ma, and B. Li, “Analysis of Stairs-Climbing Ability for a Tracked Reconfigurable Modular Robot,” IEEE Int. Workshop on Safety, Security, and Rescue Rototics (SSRR), pp. 36-41, 2005. https://doi.org/10.1109/SSRR.2005.1501238
- [27] E. Rohmer, S. P. N. Singh, and M. Freese, “CoppeliaSim (formerly V-REP): A Versatile and Scalable Robot Simulation Framework,” 2013 Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1321-1326, 2013. https://doi.org/10.1109/IROS.2013.6696520
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.