Paper:
Motion Design of a Snake Robot to Move Between Two Adjacent Walls
Ryo Ariizumi*1, Hiroto Mizuno*2, Hiroki Sasaki*1, Toru Asai*3, Shun-ichi Azuma*4, and Motoyasu Tanaka*5

*1Tokyo University of Agriculture and Technology
2-24-16 Naka-cho, Koganei, Tokyo 184-8588, Japan
*2Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan
*3Chubu University
1200 Matsumoto-cho, Kasugai, Aichi 487-8501, Japan
*4Kyoto University
Yoshida-honmachi, Sakyo-ku, Kyoto 606-8501, Japan
*5The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan

This paper proposes a novel motion design for a snake robot to move freely in a space between two adjacent walls. Snake robots are expected to be useful in several difficult environments because of their high degrees of freedom. Particularly, they are suitable for use in narrow spaces. However, freely moving in narrow spaces, such as spaces between two adjacent walls, remains an open problem. In this study, inspired by helical rolling motion, which is used to move on a pipe, we propose a novel motion method that enables a snake robot to move freely in a narrow space between two adjacent walls. The motion and model are validated using physical simulations.
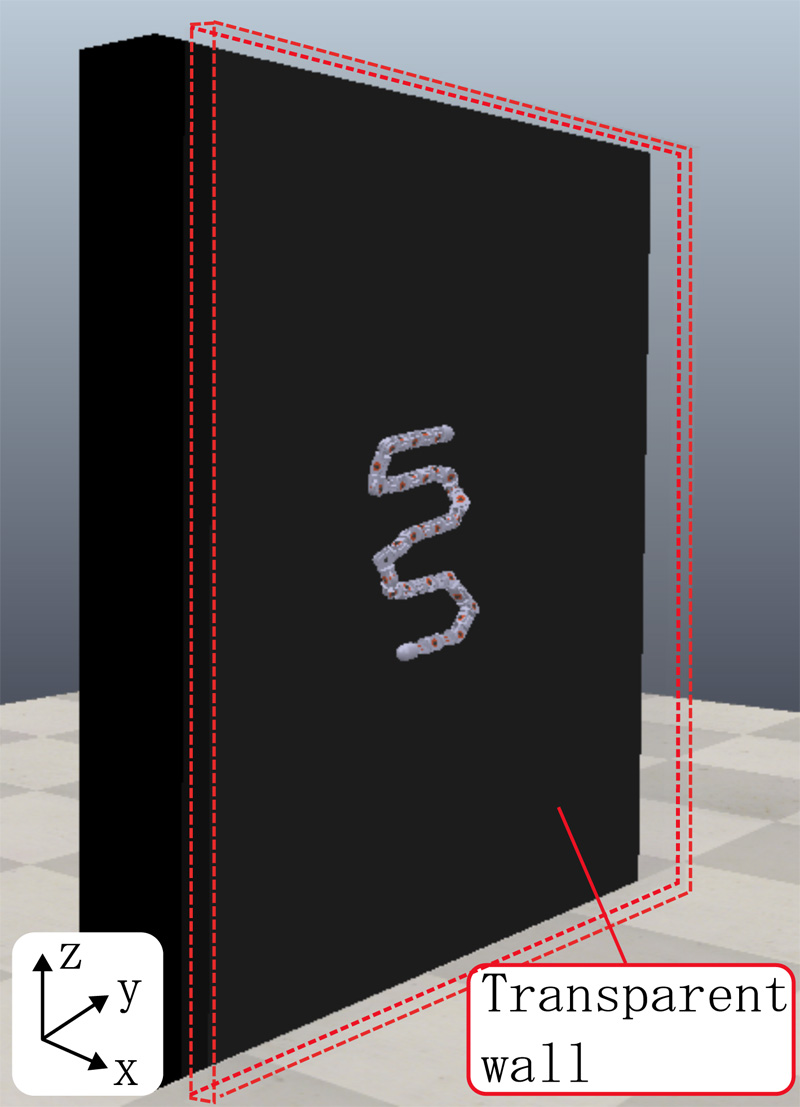
Overview of the simulation environment
- [1] B. C. Jayne, “What defines different modes of snake locomotion?,” Integrative and comparative biology, Vol.60, No.1, pp. 156-170, 2020. https://doi.org/10.1093/icb/icaa017
- [2] E. Kelasidi, P. Liljeback, K. Y. Pettersen, and J. T. Gravdahl, “Innovation in underwater robots: Biologically inspired swimming snake robots,” IEEE Robotics and Automation Magazine, Vol.23, No.1, pp. 44-62, 2016. https://doi.org/10.1109/MRA.2015.2506121
- [3] M. Tanaka, M. Nakajima, Y. Suzuki, and K. Tanaka, “Development and control of articulated mobile robot for climbing steep stairs,” IEEE/ASME Trans. on Mechatronics, Vol.23, No.2, pp. 531-541, 2018. https://doi.org/10.1109/TMECH.2018.2792013
- [4] B. Li, L. Chen, and Y. Lv, “Development of a snake-like robot adapting to the ground,” ICARCV 2004 8th Control, Automation, Robotics and Vision Conf., Vol.1, pp. 273-277, 2004. https://doi.org/10.1109/ICARCV.2004.1468836
- [5] S. Ma, F. Qin, S. Chen, L. Li, J. Wang, Z. Wang, S. Lie, and X. Xiao, “Self-adaptive rolling motion for snake robots in unstructured environments based on torque control,” Biomimetic Intelligence and Robotics, Vol.3, Article No.100117, 2023. https://doi.org/10.1016/j.birob.2023.100117
- [6] S. Ali, “Dynamic modeling and simulation of a snake-like multibody robotic system with ground-adaptive strategy and efficient undulatory locomotion,” Multibody System Dynamics, Vol.62, pp. 235-247, 2024. https://doi.org/10.1007/s11044-024-09967-3
- [7] T. Takemori, M. Tanaka, and F. Matsuno, “Adaptive helical rolling of a snake robot to a straight pipe with irregular cross-sectional shape,” IEEE Trans. on Robotics, Vol.39, No.1, pp. 437-451, 2023. https://doi.org/10.1109/TRO.2022.3189224
- [8] T. Takanishi, M. Nakajima, T. Takemori, and M. Tanaka, “Obstacle-aided locomotion of a snake robot using piecewise helixes,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 10542-10549, 2022. https://doi.org/10.1109/LRA.2022.3194689
- [9] S. Hirose and H. Yamada, “Snake-like robots [tutorial],” IEEE Robotics and Automation Magazine, Vol.16, No.1, pp. 88-98, 2009. https://doi.org/10.1109/MRA.2009.932130
- [10] J. K. Hopkins, B. W. Spranklin, and S. K. Gupta, “A survey of snake-inspired robot designs,” Bioinspiration and Biomimetics, Vol.4, No.2, Article No.021001, 2009. https://doi.org/10.1088/1748-3182/4/2/021001
- [11] J. Liu, Y. Tong, and J. Liu, “Review of snake robots in constrained environments,” Robotics and Autonomous Systems, Vol.41, Article No.103785, 2021. https://doi.org/10.1016/j.robot.2021.103785
- [12] H. Marvi, C. Gong, N. Gravish, H. Astley, M. Travers, R. L. Hatton, J. R. Mendelson III, H. Choset, D. L. Hu, and D. I. Goldman, “Sidewinding with minimal slip: Snake and robot ascent of sandy slopes,” Science, Vol.346, No.6206, pp. 224-229, 2014. https://doi.org/10.1126/science.1255718
- [13] A. A. Transeth, R. I. Leine, C. Glocker, K. Y. Pettersen, and P. Liljebäck, “Snake Robot Obstacle-Aided Locomotion: Modeling, Simulations, and Experiments,” IEEE Trans. on Robotics, Vol.24, No.1, pp. 88-104, 2008. https://doi.org/10.1109/TRO.2007.914849
- [14] T. Takemori, M. Tanaka, and F. Matsuno, “Ladder climbing with a snake robot,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2018. https://doi.org/10.1109/IROS.2018.8594411
- [15] R. Watanabe and M. Tanaka, “Principle of object support by rope deformation and its application to rope climbing by snake robot,” Advanced Robotics, Vol.37, No.9, pp. 591-602, 2023. https://doi.org/10.1080/01691864.2023.2170189
- [16] A. A. Transeth and K. Y. Pettersen, “Developments in snake robot modeling and locomotion,” IEEE 2006 9th Int. Conf. on Control, Automation, Robotics and Vision, 2006. https://doi.org/10.1109/ICARCV.2006.345142
- [17] A. Akbarzadeh, J. Safehian, J. Safehian, and H. Kalani, “Generating snake robot concertina locomotion using a new dynamic curve,” Int. J. of Modeling and Optimization, Vol.1, No.2, Article No.134, 2011. https://doi.org/10.7763/IJMO.2011.V1.24
- [18] I. Virgala, M. Kelemen, P. Božek, Z. Bobovský, M. Hagara, E. Prada, P. Oščádal, and M. Varga, “Investigation of snake robot locomotion possibilities in a pipe,” Symmetry, Vol.12, No.6, Article No.939, 2020. https://doi.org/10.3390/sym12060939
- [19] F. Barazandeh, B. Bahr, and A. Moradi, “How self-locking reduces actuators torque in climbing snake robots,” 2007 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, 2007. https://doi.org/10.1109/AIM.2007.4412524
- [20] T. Kamegawa, T. Harada, and A. Gofuku, “Realization of cylinder climbing locomotion with helical form by a snake robot with passive wheels,” IEEE Int. Conf. on Robotics and Automation, pp. 3067-3072, 2009. https://doi.org/10.1109/ROBOT.2009.5152862
- [21] A. Shapiro, A. Greenfield, and H. Choset, “Frictional compliance model development and experiments for snake robot climbing,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 574-579, 2007. https://doi.org/10.1109/ROBOT.2007.363048
- [22] M. Vim, S. Homans, and K. Roufas, “Climbing with snake-like robots,” IFAC Proc. Volumes, Vol.34, No.4, pp. 7-12, 2001. https://doi.org/10.1016/S1474-6670(17)34265-9
- [23] K. Wang, W. Wang, and H. Zhang, “The mechanical properties of a wall-climbing caterpillar robot: Analysis and experiment,” Int. J. of Advanced Robotic Systems, Vol.10, No.1, Article No.34, 2013. https://doi.org/10.5772/53493
- [24] T. Takemori, M. Tanaka, and F. Matsuno, “Gait design for a snake robot by connecting curve segments and experimental demonstration,” IEEE Trans. on Robotics, Vol.34, No.5, pp. 1384-1391, 2018. https://doi.org/10.1109/TRO.2018.2830346
- [25] H. Yamada and S. Hirose, “Study on the 3D shape of active cord mechanism,” IEEE Int. Conf. on Robotics and Automation, pp. 2890-2895, 2006. https://doi.org/10.1109/ROBOT.2006.1642140
- [26] J. Yoon, B. Son, and D. Lee, “Comparative Study of Physics Engines for Robot Simulation with Mechanical Interaction,” Applied Sciences, Vol.13, No.2, Article No.680, 2023. https://doi.org/10.3390/app13020680
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.