Paper:
Evaluation of the Travel Efficiency of a Transformable Snake-Like Robot Utilizing Infinite Rotation Joint
Akio Yamano
 and Tsuyoshi Kimoto
and Tsuyoshi Kimoto
Department of Aerospace Engineering, Graduate School of Engineering, Osaka Metropolitan University
1-1 Gakuen-cho, Naka-ku, Sakai, Osaka 599-8531, Japan

Snake-like robots can achieve flexible movement by simultaneously actuating multiple joints; however, the challenge of high power consumption by driving numerous servomotors under high-load conditions remains. To address this issue, we propose a mechanism that transforms the rear link of a snake-like robot into a wheel-like configuration, enabling a three-wheeled vehicle mode that provides the same traveling speed and efficiency as a wheeled mobile robots on flat surfaces. First, we detail the method for driving the servomotor to achieve undulating locomotion in the snake-like robot with nonuniform link lengths. Next, we propose a method for smoothly switching between the complex-shaped wheel mode and undulating locomotion. Finally, we conduct experiments to assess the travel efficiency in both the undulating mode and the proposed wheel mode across various road surface conditions. Our results demonstrate that the wheel mode achieves higher travel efficiency than the undulating mode on the smooth floors and asphalt.
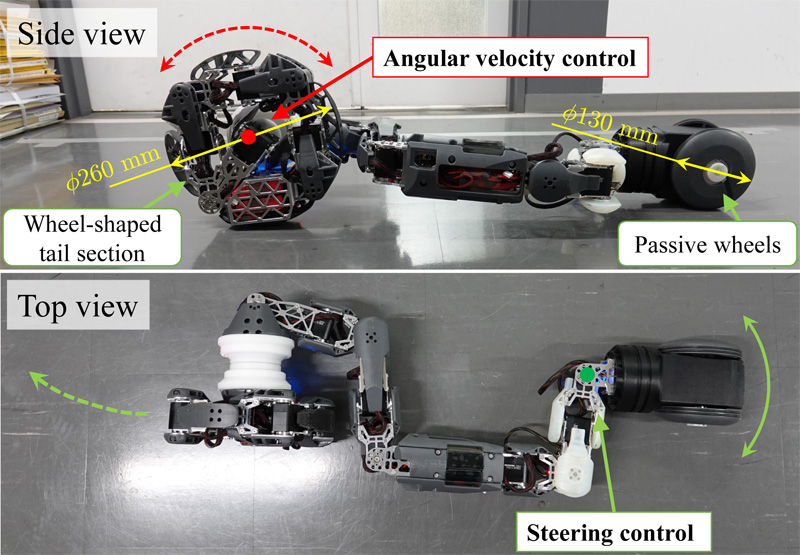
The transformable snake robot
- [1] X. Zang, Y. Liu, Z. Lin, C. Zhang, and S. Iqbal, “Two multi-linked rescue robots: design, construction and field tests,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.10, No.6, Article No.JAMDSM0089, 2016. https://doi.org/10.1299/jamdsm.2016jamdsm0089
- [2] S. Wakimoto, J. Nakajima, M. Takata, T. Kanda, and K. Suzumori, “A micro snake-like robot for small pipe inspection,” 2003 Int. Symp. on Micromechatronics and Human Science, pp. 303-308, 2003. https://doi.org/10.1109/MHS.2003.1249959
- [3] S. Fjerdingen, P. Liljebäck, and A. Transeth, “A snake-like robot for internal inspection of complex pipe structures (PIKo),” 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 5665-5671, 2009. https://doi.org/10.1109/IROS.2009.5354751
- [4] I. Ismail, A. Anuar, K. Sahari, M. Baharuddin, M. Jalal, and J. Saad, “Development of in-pipe inspection robot: A review,” 2012 IEEE Conf. on Sustainable Utilization and Development in Engineering and Technology, pp. 310-315, 2012. https://doi.org/10.1109/STUDENT.2012.6408425
- [5] F. Enner, D. Rollinson, and H. Choset, “Motion estimation of snake robots in straight pipes,” 2013 IEEE Int. Conf. on Robotics and Automation, pp. 5168-5173, 2013. https://doi.org/10.1109/ICRA.2013.6631316
- [6] N. Matsumoto, M. Tanaka, M. Nakajima, M. Fujita, and K. Tadakuma, “Development of a folding arm on an articulated mobile robot for plant disaster prevention,” Advanced Robotics, Vol.34, No.2, pp. 89-103, 2020. https://doi.org/10.1080/01691864.2019.1689167
- [7] X. Hou, Y. Shi, L. Li, Y. Tian, Y. Su, T. Ding, and Z. Deng, “Revealing the mechanical characteristics via kinematic wave model for snake-like robot executing exploration of lunar craters,” IEEE Access, Vol.8, pp. 38368-38379, 2020. https://doi.org/10.1109/ACCESS.2020.2971221
- [8] S. Hirose, P. Cave, and C. Goulden, “Biologically Inspired Robots: Snake-like Locomotors and Manipulators,” Oxford science publications, Oxford University Press, 1993.
- [9] S. Hirose and Y. Umetani, “Kinematic control of active cord mechanism with tactile sensors,” Trans. of the Society of Instrument and Control Engineers, Vol.12, No.5, pp. 543-547, 1976. https://doi.org/10.9746/sicetr1965.12.543
- [10] K. Ono, J. Ute, and M. Makashima, “Self-excited locomotion of a snake mechanism,” Trans. of the Japan Society Mechanical Engineers, C, Vol.68, No. 668, pp. 1096-1103, 2002. https://doi.org/10.1299/kikaic.68.1096
- [11] Y. Fukuoka, K. Otaka, R. Takeuchi, K. Shigemori, and K. Inoue, “Mechanical designs for field undulatory locomotion by a wheeled snake-like robot with decoupled neural oscillators,” IEEE Trans. on Robotics, Vol.39, No.2, pp. 959-977, 2023. https://doi.org/10.1109/TRO.2022.3226364
- [12] M. Mori and S. Hirose, “Locomotion of 3d snake-like robots – shifting and rolling control of active cord mechanism acm-r3 –,” J. Robot. Mechatronics, Vol.18, No.5, pp. 521-528, 2006. https://doi.org/10.20965/jrm.2006.p0521
- [13] M. Sato, M. Fukaya, and T. Iwasaki, “Serpentine locomotion with robotic snakes,” IEEE Control Systems Magazine, Vol.22, No.1, pp. 64-81, 2002. https://doi.org/10.1109/37.980248
- [14] H. W. Lissmann, “Rectilinear Locomotion in a Snake (Boa Occidentalis),” J. of Experimental Biology, Vol.26, No.4, pp. 368-379, 1950. https://doi.org/10.1242/jeb.26.4.368
- [15] J. Gray, “The mechanism of locomotion in snakes,” J. of Experimental Biology, Vol.23, No.2, pp. 101-120, 1946. https://doi.org/10.1242/jeb.23.2.101
- [16] H. Yamada and S. Hirose, “Study of active cord mechanism—generalized basic equations of the locomotion dynamics of the acm and analysis of sinus-lifting—,” J. of the Robotics Society of Japan, Vol.26, No.7, pp. 801-811, 2008.
- [17] R. Ariizumi and F. Matsuno, “Dynamic analysis of three snake robot gaits,” IEEE Trans. on Robotics, Vol.33, No.5, pp. 1075-1087, 2017. https://doi.org/10.1109/TRO.2017.2704581
- [18] D. Li, Y. Zhang, W. Tong, P. Li, R. Law, X. Xu, L. Zhu, and E. Q. Wu, “Anti-disturbance path-following control for snake robots with spiral motion,” IEEE Trans. on Industrial Informatics, Vol.19, No.12, pp. 11929-11940, 2023. https://doi.org/10.1109/TII.2023.3254534
- [19] T. Kamegawa, F. Matsuno, and R. Chatterjee, “Proposition of twisting mode of locomotion and ga based motion planning for transition of locomotion modes of 3-dimensional snake-like robot,” Proc. of 2002 IEEE Int. Conf. on Robotics and Automation, Vol.2, pp. 1507-1512, 2002. https://doi.org/10.1109/ROBOT.2002.1014757
- [20] A. A. Transeth, R. I. Leine, C. Glocker, K. Y. Pettersen, and P. Liljebäck, “Snake robot obstacle-aided locomotion: Modeling, simulations, and experiments,” IEEE Trans. on Robotics, Vol.24, No.1, pp. 88-104, 2008. https://doi.org/10.1109/TRO.2007.914849
- [21] E. Kelasidi, P. Liljebäck, K. Y. Pettersen, and J. T. Gravdahl, “Experimental investigation of efficient locomotion of underwater snake robots for lateral undulation and eel-like motion patterns,” Robotics and Biomimetics, Vol.2, No.8, pp. 1-27, 2015. https://doi.org/10.1186/s40638-015-0029-4
- [22] A. Yamano, T. Kimoto, Y. Inoue, and M. Chiba, “Optimal swimming locomotion of snake-like robot in viscous fluids,” J. of Fluids and Structures, Vol.123, Article No.104007, 2023. https://doi.org/10.1016/j.jfluidstructs.2023.104007
- [23] K. Kouno, H. Yamada, and S. Hirose, “Development of active-joint active-wheel high traversability snake-like robot acm-r4.2,” J. Robot. Mechatronics, Vol.25, No.3, pp. 559-566, 2013. https://doi.org/10.20965/jrm.2013.p0559
- [24] M. Tanaka, M. Nakajima, Y. Suzuki, and K. Tanaka, “Development and control of articulated mobile robot for climbing steep stairs,” IEEE/ASME Trans. on Mechatronics, Vol.23, No.2, pp. 531-541, 2018. https://doi.org/10.1109/TMECH.2018.2792013
- [25] W. Zhao, J. Wang, and Y. Fei, “A multigait continuous flexible snake robot for locomotion in complex terrain,” IEEE/ASME Trans. on Mechatronics, Vol.27, No.5, pp. 3751-3761, 2022. https://doi.org/10.1109/TMECH.2021.3131766
- [26] T. Takayama and S. Hirose, “Development of souryu-i connected crawler vehicle for inspection of narrow and winding space,” 2000 26th Annual Conf. of the IEEE Industrial Electronics Society, 2000 IEEE Int. Conf. on Industrial Electronics, Control and Instrumentation (IECON 2000): 21st Century Technologies, Vol.1, pp. 143-148, 2000. https://doi.org/10.1109/IECON.2000.973140
- [27] F. Richter, P. V. Gavrilov, H. M. Lam, A. Degani, and M. C. Yip, “Arcsnake: Reconfigurable snakelike robot with archimedean screw propulsion for multidomain mobility,” IEEE Trans. on Robotics, Vol.38, No.2, pp. 797-809, 2022. https://doi.org/10.1109/TRO.2021.3104968
- [28] H. Kurokawa, A. Kamimura, E. Yoshida, K. Tomita, S. Murata, and S. Kokaji, “Self-reconfigurable modular robot (M-TRAN) and its motion design,” Int. Conf. on Control, Automation, Robotics and Vision (ICARCV), pp. 51-56, 2002. https://doi.org/10.1109/ICARCV.2002.1234789
- [29] J. Zhao, X. Cui, Y. Zhu, and S. Tang, “A new self-reconfigurable modular robotic system UBot: Multi-mode locomotion and self-reconfiguration,” 2011 IEEE Int. Conf. on Robotics and Automation, pp. 1020-1025, 2011. https://doi.org/10.1109/ICRA.2011.5980293
- [30] X. Wang, H. Jin, Y. Zhu, B. Chen, D. Bie, Y. Zhang, and J. Zhao, “Serpenoid polygonal rolling for chain-type modular robots: A study of modeling, pattern switching and application,” Robotics and Computer-Integrated Manufacturing, Vol.39, pp. 56-67, 2016. https://doi.org/10.1016/j.rcim.2015.12.003
- [31] A. Salagame, N. Bhattachan, A. Caetano, I. McCarthy, H. Noyes, B. Petersen, A. Qiu, M. Schroeter, N. Smithwick, K. Sroka, J. Widjaja, Y. Bohra, K. Venkatesh, K. Gangaraju, P. Ghanem, I. Mandralis, E. Sihite, A. Kalantari, and A. Ramezani, “How strong a kick should be to topple northeastern’s tumbling robot?,” 2023.
- [32] T. Takemori, M. Tanaka, and F. Matsuno, “Gait design of a snake robot by connecting simple shapes,” 2016 IEEE Int. Symp. on Safety, Security, and Rescue Robotics (SSRR), pp. 189-194, 2016. https://doi.org/10.1109/SSRR.2016.7784297
- [33] T. Takemori, M. Tanaka, and F. Matsuno, “Hoop-passing motion for a snake robot to realize motion transition across different environments,” IEEE Trans. on Robotics, Vol.37, No.5, pp. 1696-1711, 2021. https://doi.org/10.1109/TRO.2021.3063438
- [34] A. Yamano, Y. Ikeda, K. Imai, and M. Chiba, “Efficient rolling motion for snake-like robots utilizing a cog shift,” Mechatronics, Vol.94, Article No.103024, 2023. https://doi.org/10.1016/j.mechatronics.2023.103024
- [35] A. Yamano, T. Kimoto, and T. Iwasa, “High-efficiency, high-speed traveling snake-like robot with infinite rotation axis,” The 2024 16th IEEE/SICE Int. Symp. on System Integration, pp. 1375-1380, 2024. https://doi.org/10.1109/SII58957.2024.10417619
- [36] A. Kakogawa, T. Kawabata, and S. Ma, “Plate-springed parallel elastic actuator for efficient snake robot movement,” IEEE/ASME Trans. on Mechatronics, Vol.26, No.6, pp. 3051-3063, 2021. https://doi.org/10.1109/TMECH.2021.3052037
- [37] A. Crespi and A. Ijspeert, “Online optimization of swimming and crawling in an amphibious snake robot,” IEEE Trans. on Robotics, Vol.24, No.1, pp. 75-87, 2008. https://doi.org/10.1109/TRO.2008.915426
- [38] A. Yamano, K. Shimizu, M. Chiba, and H. Ijima, “Fluid force identification acting on snake-like robots swimming in viscous fluids,” J. of Fluids and Structures, Vol.106, Article No.103351, 2021. https://doi.org/10.1016/j.jfluidstructs.2021.103351
- [39] H. Astley, C. Gong, J. Dai, M. Travers, M. Serrano, P. Vela, H. Choset, J. Mendelson III, D. Hu, and D. Goldman, “Modulation of orthogonal body waves enables high maneuverability in sidewinding locomotion,” PNAS, Vol.112, No.19, pp. 6200-6205, 2015. https://doi.org/10.1073/pnas.1418965112
- [40] H. Marvi, C. Gong, N. Gravish, H. Astley, M. Travers, R. Hatton, J. Mendelson III, H. Choset, D. Hu, and D. Goldman, “Sidewinding with minimal slip snake and robot ascent of sandy slopes,” Science, Vol.346, No.6206, pp. 224-229, 2014. https://doi.org/10.1126/science.1255718
- [41] M. Tesch, K. Lipkin, I. Brown, R. Hatton, A. Peck, J. Rembisz, and H. Choset, “Parameterized and scripted gaits for modular snake robots,” Advanced Robotics, Vol.23, No.9, pp. 1131-1158, 2009. https://doi.org/10.1163/156855309X452566
- [42] H. Yamada and S. Hirose, “Study on the 3d shape of active cord mechanism,” Proc. of 2006 IEEE Int. Conf. on Robotics and Automation (ICRA 2006), pp. 2890-2895, 2006. https://doi.org/10.1109/ROBOT.2006.1642140
- [43] M. Nakajima, S. Fukumura, K. Tanaka, and M. Tanaka, “Local body shape control of an articulated mobile robot and an application for recovery from a stuck state,” Advanced Robotics, Vol.36, No.10, pp. 488-500, 2022. https://doi.org/10.1080/01691864.2022.2063036
- [44] M. Tanaka and K. Tanaka, “Shape control of a snake robot with joint limit and self-collision avoidance,” IEEE Trans. on Control Systems Technology, Vol.25, No.4, pp. 1441-1448, 2017. https://doi.org/10.1109/TCST.2016.2614832
- [45] V. Varlashin and O. Shmakov, “Comparative analysis of the virtual and physical experiments with a snake robot’s rectilinear movement,” J. of Physics: Conf. Series, Vol.1326, Article No.012037, 2019. https://doi.org/10.1088/1742-6596/1326/1/012037
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.