Paper:
Local Shape Transformation of a Snake Robot by Changing Approximation Range on Continuous Curve
Ching Wen Chin
 and Motoyasu Tanaka
and Motoyasu Tanaka
The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan

A snake robot can form various shapes by fitting to an arbitrary continuous curve thanks to its numerous degrees of freedom. When traversing an unknown complex environment, a snake robot may need to perform local shape transformation to avoid obstacles or perform specific tasks. In this study, we present a local shape transformation control method for expanding the mobility of a snake robot. The proposed control method lifts a local part of the robot away from the target continuous curve while the leading part and the trailing part shift accordingly to remain fitted to the continuous curve without twisting. The proposed local shape transformation is realized by changing the approximation range on the continuous curve without changing the shape of the continuous curve. Simulations were conducted to evaluate the effectiveness of the local hump-shaped transformation control on various types of continuous curves. We also evaluated the proposed control method by comparing it with other local shape transformation control methods through simulations. Additionally, we propose two examples of applications which are the recovery from a stuck state and recovery from joint failure. Experiments were conducted to verify the effectiveness of the proposed control method.
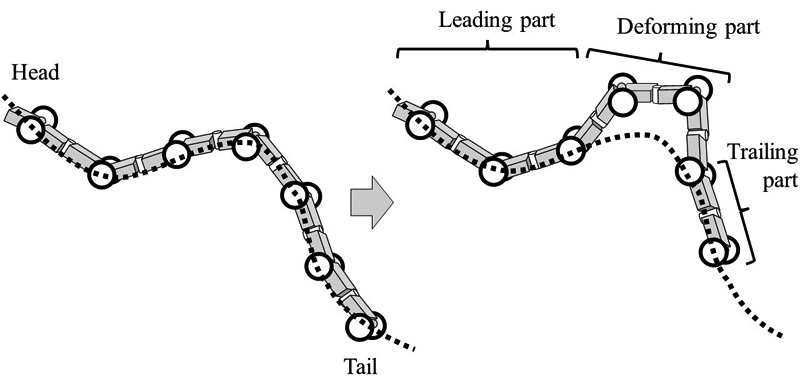
Local hump-shaped transformation
- [1] G. Granosik, “Hypermobile robots – The survey,” J. of Intelligent & Robotic Systems, Vol.75, No.1, pp. 147-169, 2014. https://doi.org/10.1007/s10846-013-9985-5
- [2] H. Yamada and S. Hirose, “Development of practical 3-dimensional active cord mechanism ACM-R4,” J. Robot. Mechatron., Vol.18, No.3, pp. 305-311, 2006. https://doi.org/10.20965/jrm.2006.p0305
- [3] K. Kouno, H. Yamada, and S. Hirose, “Development of active-joint active-wheel high traversability snake-like robot ACM-R4.2,” J. Robot. Mechatron., Vol.25, No.3, pp. 559-566, 2013. https://doi.org/10.20965/jrm.2013.p0559
- [4] H. Yamada, S. Takaoka, and S. Hirose, “A snake-like robot for real-world inspection applications (the design and control of a practical active cord mechanism),” Advanced Robotics, Vol.27, No.1, pp. 47-60, 2013. https://doi.org/10.1080/01691864.2013.752318
- [5] M. Tanaka, K. Tadakuma, M. Nakajima, and M. Fujita, “Task-space control of articulated mobile robots with a soft gripper for operations,” IEEE Trans. on Robotics, Vol.35, No.1, pp. 135-146, 2019. https://doi.org/10.1109/TRO.2018.2878361
- [6] M. Tanaka, M. Nakajima, Y. Suzuki, and K. Tanaka, “Development and control of articulated mobile robot for climbing steep stairs,” IEEE/ASME Trans. on Mechatronics, Vol.23, No.2, pp. 531-541, 2018. https://doi.org/10.1109/TMECH.2018.2792013
- [7] C. W. Chin, M. Nakajima, K. Furuike, K. Kon, and M. Tanaka, “Development and control of an articulated mobile robot T2 snake-4.2 for plant disaster prevention – Development of M2 arm and C-hand,” Advanced Robotics, Vol.36, No.21, pp. 1134-1155, 2022. https://doi.org/10.1080/01691864.2022.2138540
- [8] Q. Fu and C. Li, “Robotic modelling of snake traversing large, smooth obstacles reveals stability benefits of body compliance,” Royal Society Open Science, Vol.7, No.2, Article No.191192, 2020. https://doi.org/10.1098/rsos.191192
- [9] H. Komura, H. Yamada, and S. Hirose, “Development of snake-like robot ACM-R8 with large and mono-tread wheel,” Advanced Robotics, Vol.29, No.17, pp. 1081-1094, 2015. https://doi.org/10.1080/01691864.2014.971054
- [10] F. Matsuno and K. Mogi, “Redundancy controllable system and control of snake robots based on kinematic model,” Proc. of the 39th IEEE Conf. on Decision and Control, Vol.5, pp. 4791-4796, 2000. https://doi.org/10.1109/CDC.2001.914686
- [11] M. Tanaka and F. Matsuno, “Experimental study of redundant snake robot based on kinematic model,” Proc. of 2007 IEEE Int. Conf. on Robotics and Automation, pp. 2990-2995, 2007. https://doi.org/10.1109/ROBOT.2007.363926
- [12] H. Date, Y. Hoshi, and M. Sampei, “Locomotion control of a snake-like robot based on dynamic manipulability,” Proc. of 2000 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.3, pp. 2236-2241, 2000. https://doi.org/10.1109/IROS.2000.895301
- [13] G. S. Chirikjian and J. W. Burdick, “A modal approach to hyper-redundant manipulator kinematics,” IEEE Trans. on Robotics and Automation, Vol.10, No.3, pp. 343-354, 1994. https://doi.org/10.1109/70.294209
- [14] S. B. Andersson, “Discretization of a continuous curve,” IEEE Trans. on Robotics, Vol.24, No.2, pp. 456-461, 2008. https://doi.org/10.1109/TRO.2008.917000
- [15] R. L. Hatton and H. Choset, “Generating gaits for snake robots: Annealed chain fitting and keyframe wave extraction,” Autonomous Robots, Vol.28, No.3, pp. 271-281, 2010. https://doi.org/10.1007/s10514-009-9175-2
- [16] P. Liljebäck, K. Y. Pettersen, Ø. Stavdahl, and J. T. Gravdahl, “A 3D motion planning framework for snake robots,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1100-1107, 2014. https://doi.org/10.1109/IROS.2014.6942695
- [17] H. Yamada and S. Hirose, “Study of active cord mechanism—Approximations to continuous curves of a multi-joint body—,” J. of the Robotics Society of Japan, Vol.26, No.1, pp. 110-120, 2008 (in Japanese). https://doi.org/10.7210/jrsj.26.110
- [18] T. Takemori, M. Tanaka, and F. Matsuno, “Gait design for a snake robot by connecting curve segments and experimental demonstration,” IEEE Trans. on Robotics, Vol.34, No.5, pp. 1384-1391, 2018. https://doi.org/10.1109/TRO.2018.2830346
- [19] T. Takanashi, M. Nakajima, T. Takemori, and M. Tanaka, “Obstacle-aided locomotion of a snake robot using piecewise helixes,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 10542-10549, 2022. https://doi.org/10.1109/LRA.2022.3194689
- [20] M. Nakajima, S. Fukumura, K. Tanaka, and M. Tanaka, “Local body shape control of an articulated mobile robot and an application for recovery from a stuck state,” Advanced Robotics, Vol.36, No.10, pp. 488-500, 2022. https://doi.org/10.1080/01691864.2022.2063036
- [21] K. Furuike, M. Nakajima, S. Fukumura, and M. Tanaka, “Semiautonomous recovery system from a stuck state of an articulated mobile robot,” Advanced Robotics, Vol.37, No.17, pp. 1112-1127, 2023. https://doi.org/10.1080/01691864.2023.2240878
- [22] G. S. Chirikjian and J. W. Burdick, “Kinematics of hyper-redundant robot locomotion with applications to grasping,” Proc. of 1991 IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 720-725, 1991. https://doi.org/10.1109/ROBOT.1991.131669
- [23] W. Zhen, C. Gong, and H. Choset, “Modeling rolling gaits of a snake robot,” 2015 IEEE Int. Conf. on Robotics and Automation, pp. 3741-3746, 2015. https://doi.org/10.1109/ICRA.2015.7139719
- [24] W. Qi, T. Kamegawa, and A. Gofuku, “Helical wave propagation motion for a snake robot on a vertical pipe containing a branch,” Artificial Life and Robotics, Vol.23, No.4, pp. 515-522, 2018. https://doi.org/10.1007/s10015-018-0479-1
- [25] M. Nakajima, M. Tanaka, and K. Tanaka, “Simultaneous control of two points for snake robot and its application to transportation,” IEEE Robotics and Automation Letters, Vol.5, No.1, pp. 111-118, 2020. https://doi.org/10.1109/LRA.2019.2947003
- [26] R. Irani et al., “Analysis of joint failures on the lateral undulation gait of a robotic snake,” Trans. of the Canadian Society for Mechanical Engineering, Vol.39, No.2, pp. 253-268, 2015. https://doi.org/10.1139/tcsme-2015-0018
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.