Paper:
Flexible Path Planning for Multi-Agent Field Observation
Takuya Kobayashi*
 and Takashi Kawamura**
and Takashi Kawamura**
*Department of Science and Technology, Graduate School of Medicine, Science and Technology, Shinshu University
3-15-1 Tokida, Ueda, Nagano 386-8567, Japan
**Faculty of Textile Science and Technology, Shinshu University
3-15-1 Tokida, Ueda, Nagano 386-8567, Japan

This paper proposes a flexible path-planning method for conducting agricultural observation tasks using multiple autonomous guided vehicles. The observation task was formulated as the rural postman problem by graphing the agricultural field to be observed and assigning costs to mandatory and optional paths. The observation area was re-divided according to the progress of each robot’s work, and the latest path was planned to minimize the difference between the working time of individual robots, thereby reducing the overall working time. Simulations were conducted to verify the influence of the parameters used in the proposed method. The effect of workload adjustment on progress delay was verified, and the increase in overall working time owing to delay was reduced by an average of 32.9%. A performance comparison was conducted using Google OR-Tools, software specialized for combinatorial optimization. Superior solutions with shorter computation times were obtained using the proposed method.
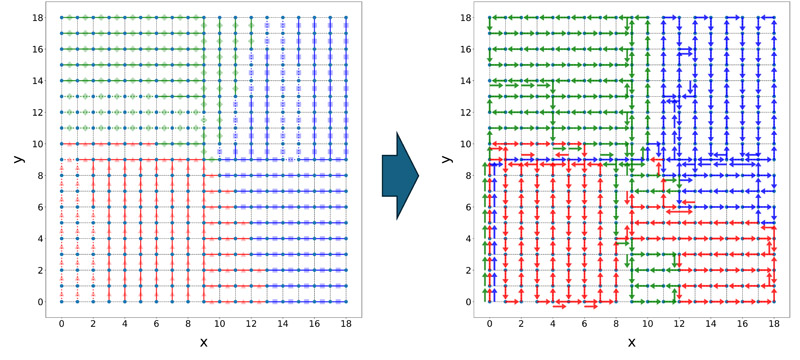
Changes in assigned segments and paths of 3 agents
- [1] D. J. Mulla, “Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps,” Biosystems Engineering, Vol.114, No.4, pp. 358-371, 2013. https://doi.org/10.1016/j.biosystemseng.2012.08.009
- [2] A. Barrientos, J. Colorado, J. del Cerro, A. Martinez, C. Rossi, D. Sanz, and J. Valente, “Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots,” J. of Field Robotics, Vol.28, Issue 5, pp. 667-689, 2011. https://doi.org/10.1002/rob.20403
- [3] Aqeel-ur-Rehman, A. Z. Abbasi, N. Islam, and Z. A. Shaikh, “A review of wireless sensors and networks’ applications in agriculture,” Computer Standards & Interfaces, Vol.36, Issue 2, pp. 263-270, 2014. https://doi.org/10.1016/j.csi.2011.03.004
- [4] T. Hoshi, K. Ueda, Y. Takikawa, and T. Azuma, “Digitally Fabricated Mobile Spectrometer for Multipoint Continuous Spectroscopic Analysis of Light Environment in Greenhouse Tomato Canopies,” Environmental Control in Biology, Vol.56, Issue 4, pp. 149-155, 2018. https://doi.org/10.2525/ecb.56.149
- [5] J. K. Lenstra and A. H. G. R. Kan, “Complexity of vehicle routing and scheduling problems,” Networks, Vol.11, Issue 2, pp. 221-227, 1981. https://doi.org/10.1002/net.3230110211
- [6] E. Benavent, Á. Corberán, and J. M. Sanchis, “A metaheuristic for the min-max windy rural postman problem with K vehicles,” Computational Management Science, Vol.7, No.3, pp. 269-287, 2010. https://doi.org/10.1007/s10287-009-0119-2
- [7] J. Campbell, Á. Corberán, I. Plana, J. M. Sanchis, and P. Segura, “Polyhedral analysis and a new algorithm for the length constrained K-drones rural postman problem,” Computational Optimization and Applications, Vol.83, No.1, pp. 67-109, 2022. https://doi.org/10.1007/s10589-022-00383-x
- [8] K. Holmberg, “Heuristics for the weighted k-rural postman problem with applications to urban snow removal,” J. on Vehicle Routing Algorithms, Vol.1, No.2, pp. 105-119, 2018. https://doi.org/10.1007/s41604-018-0008-3
- [9] I. M. Al-Adwan, “Intelligent Path Planning Approach for Autonomous Mobile Robot,” J. Robot. Mechatron., Vol.33, No.6, pp. 1423-1428, 2021. https://doi.org/10.20965/jrm.2021.p1423
- [10] P. Tokekar, J. V. Hook, D. Mulla, and V. Isler, “Sensor Planning for a Symbiotic UAV and UGV System for Precision Agriculture,” IEEE Trans. on Robotics, Vol.32, Issue 6, pp. 1498-1511, 2016. https://doi.org/10.1109/TRO.2016.2603528
- [11] J. Oh, Y. Choi, J. Park, and Y. Zheng, “Complete Coverage Navigation of Cleaning Robots Using Triangular-Cell-Based Map,” IEEE Trans. on Industrial Electronics, Vol.51, Issue 3, pp. 718-726, 2004. https://doi.org/10.1109/TIE.2004.825197
- [12] N. Ohi, K. Lassak, R. Watson, J. Strader, Y. Du, C. Yang, G. Hedrick, J. Nguyen, S. Harper, D. Reynolds, C. Kilic, J. Hikes, S. Mills, C. Castle, B. Buzzo, N. Waterland, J. Gross, Y.-L. Park, X. Li, and Y. Gu, “Design of an Autonomous Precision Pollination Robot,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 7711-7718, 2018. https://doi.org/10.1109/IROS.2018.8594444
- [13] T. Sasaki, G. Enriquez, T. Miwa, and S. Hashimoto, “Adaptive Path Planning for Cleaning Robots Considering Dust Distribution,” J. Robot. Mechatron., Vol.30, No.1, pp. 5-14, 2018. https://doi.org/10.20965/jrm.2018.p0005
- [14] G. Mier, J. Valente, and S. de Bruin, “Fields2Cover: An Open-Source Coverage Path Planning Library for Unmanned Agricultural Vehicles,” IEEE Robotics and Automation Letters, Vol.8, Issue 4, pp. 2166-2172, 2023. https://doi.org/10.1109/LRA.2023.3248439
- [15] H. Sori, H. Inoue, H. Hatta, and Y. Ando, “Effect for a Paddy Weeding Robot in Wet Rice Culture,” J. Robot. Mechatron., Vol.30, No.2, pp. 198-205, 2018. https://doi.org/10.20965/jrm.2018.p0198
- [16] T. R. Schäfle, M. Mitschke, and N. Uchiyama, “Generation of Optimal Coverage Paths for Mobile Robots Using Hybrid Genetic Algorithm,” J. Robot. Mechatron., Vol.33, No.1, pp. 11-23, 2021. https://doi.org/10.20965/jrm.2021.p0011
- [17] I. A. Hameed, D. Bochtis, and C. A. Sørensen, “An Optimized Field Coverage Planning Approach for Navigation of Agricultural Robots in Fields Involving Obstacle Areas,” Int. J. of Advanced Robotic Systems, Vol.10, No.5, Article No.231, 2013. https://doi.org/10.5772/56248
- [18] A. A. Bakhtiari, H. Navid, J. Mehri, and D. Bochtis, “Optimal route planning of agricultural field operations using ant colony optimization,” Agricultural Engineering Int.: CIGR J., Vol.13, No.4, 2011.
- [19] A. Din, M. Y. Ismail, B. Shah, M. Babar, F. Ali, and S. U. Baig, “A deep reinforcement learning-based multi-agent area coverage control for smart agriculture,” Computers and Electrical Engineering, Vol.101, Article No.108089, 2022. https://doi.org/10.1016/j.compeleceng.2022.108089
- [20] Y. Wang, Z. He, D. Cao, L. Ma, K. Li, L. Jia, and Y. Cui, “Coverage path planning for kiwifruit picking robots based on deep reinforcement learning,” Computers and Electronics in Agriculture, Vol.205, Article No.107593, 2023. https://doi.org/10.1016/j.compag.2022.107593
- [21] P. Nolan, D. A. Paley, and K. Kroeger, “Multi-UAS path planning for non-uniform data collection in precision agriculture,” 2017 IEEE Aerospace Conf., 2017. https://doi.org/10.1109/AERO.2017.7943794
- [22] L. Collins, P. Ghassemi, E. T. Esfahani, D. Doermann, K. Dantu, and S. Chowdhury, “Scalable Coverage Path Planning of Multi-Robot Teams for Monitoring Non-Convex Areas,” 2021 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 7393-7399, 2021. https://doi.org/10.1109/ICRA48506.2021.9561550
- [23] S. Hoshino and K. Takahashi, “Dynamic Partitioning Strategies for Multi-Robot Patrolling Systems,” J. Robot. Mechatron., Vol.31, No.4, pp. 535-545, 2019. https://doi.org/10.20965/jrm.2019.p0535
- [24] J. F. Campbell, Á. Corberán, I. Plana, J. M. Sanchis, and P. Segura, “Solving the length constrained K-drones rural postman problem,” European J. of Operational Research, Vol.292, Issue 1, pp. 60-72, 2021. https://doi.org/10.1016/j.ejor.2020.10.035
- [25] F. Pedregosa, G. Varoquaux, A. Gramfort, V. Michel, B. Thirion, O. Grisel, M. Blondel, P. Prettenhofer, R. Weiss, V. Dubourg, J. Vanderplas, A. Passos, D. Cournapeau, M. Brucher, M. Perrot, and É. Duchesnay, “Scikit-learn: Machine Learning in Python,” J. of Machine Learning Research, Vol.12, No.85, pp. 2825-2830, 2011.
- [26] D. Arthur and S. Vassilvitskii, “k-means++: The advantages of careful seeding,” Proc. of the 18th Annual ACM-SIAM Symp. on Discrete Algorithms (SODA’07), pp. 1027-1035, 2007.
- [27] A. Jaszkiewicz, “Genetic local search for multi-objective combinatorial optimization,” European J. of Operational Research, Vol.137, Issue 1, pp. 50-71, 2002. https://doi.org/10.1016/S0377-2217(01)00104-7
- [28] C. Voudouris and E. Tsang, “Guided local search and its application to the traveling salesman problem,” European J. of Operational Research, Vol.113, Issue 2, pp. 469-499, 1999. https://doi.org/10.1016/S0377-2217(98)00099-X
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.