Paper:
Design of an Optimal Allocator for Power Consumption Minimization in Hexarotor Drone Control Systems
Natsuki Kawaguchi
 and Haruka Maruyama
and Haruka Maruyama
Graduate School of Engineering, University of Hyogo
2167 Shosha, Himeji, Hyogo 671-2780, Japan

This paper presents an allocator design that considers the power consumption of rotors in the attitude and altitude control system of a hexarotor drone. Based on the power consumption model, the proposed method computes the thrust force that minimizes the total power consumption of the rotor while satisfying the control force constraints required by the controller. To obtain the rotor power consumption model, we conducted experiments on the rotor characteristics using the motors and electronic speed controllers used in the drones. Finally, numerical simulations were performed using the obtained power consumption models to compare the rotor power consumption of the proposed method with that of the conventional method, quantitatively evaluating the effectiveness of the proposed method.
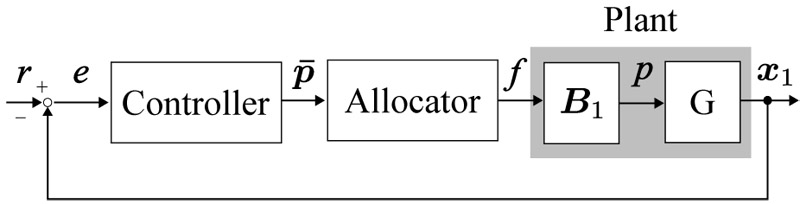
Allocator for a drone control system
- [1] K. Shimonomura, “Technical aspects of drones: Current situation, unsolved issues and prospects,” IATSS Review, Vol.44, No.2, pp. 100-107, 2019 (in Japanese). https://doi.org/10.24572/iatssreview.44.2_100
- [2] D. Tezza and M. Andujar, “The state-of-the-art of human–drone interaction: A Survey,” IEEE Access, Vol.7, pp. 167438-167454, 2019. https://doi.org/10.1109/ACCESS.2019.2953900
- [3] D. Floreano and R. J. Wood, “Science, technology and the future of small autonomous drones,” Nature, Vol.521, pp. 460-466, 2015. https://doi.org/10.1038/nature14542
- [4] K. Sekiguchi, W. Eikyu, and K. Nonaka, “Feedback control for a drone with a suspended load via hierarchical linearization,” J. Robot. Mechatron., Vol.33, No.2, pp. 274-282, 2021. https://doi.org/10.20965/jrm.2021.p0274
- [5] K. Nonami, “Soaring Drones,” NTS, 2020 (in Japanese).
- [6] K. Nonami, “Introduction to Drone Engineering—Modeling and Control—,” Corona Publishing Co., Ltd., 2020 (in Japanese).
- [7] T. A. Johansen and T. I. Fossen, “Control allocation—A survey,” Automatica, Vol.49, No.5, pp. 1087-1103, 2013. https://doi.org/10.1016/j.automatica.2013.01.035
- [8] M. W. Oppenheimer, D. B. Doman, and M. A. Bolender, “Control allocation for over-actuated systems,” 2006 14th Mediterranean Conf. on Control and Automation, 2006. https://doi.org/10.1109/MED.2006.328750
- [9] L. Zaccarian, “Dynamic allocation for input redundant control systems,” Automatica, Vol.45, No.6, pp. 1431-1438, 2009. https://doi.org/10.1016/j.automatica.2009.01.013
- [10] Y. Yang, D. Iwakura, A. Namiki, K. Nonami, and W. Wang, “Autonomous flight of hexacopter under propulsion system failure,” J. Robot. Mechatron., Vol.28, No.6, pp. 899-910, 2016. https://doi.org/10.20965/jrm.2016.p0899
- [11] Y. Yang, W. Wang, D. Iwakura, A. Namiki, and K. Nonami, “Sliding mode control for hexacopter stabilization with motor failure,” J. Robot. Mechatron., Vol.28, No.6, pp. 936-948, 2016. https://doi.org/10.20965/jrm.2016.p0936
- [12] E. Dyer, S. Sirouspour, and M. Jafarinasab, “Energy optimal control allocation in a redundantly actuated omnidirectional UAV,” 2019 Int. Conf. on Robotics and Automation (ICRA), pp. 5316-5322, 2019. https://doi.org/10.1109/ICRA.2019.8793549
- [13] D. Brescianini and R. D’Andrea, “Design, modeling and control of an omni-directional aerial vehicle,” 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3261-3266, 2016. https://doi.org/10.1109/ICRA.2016.7487497
- [14] F. Morbidi, R. Cano, and D. Lara, “Minimum-energy path generation for a quadrotor UAV,” 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1492-1498, 2016. https://doi.org/10.1109/ICRA.2016.7487285
- [15] S. S. Tohidi, Y. Yildiz, and I. Kolmanovsky, “Adaptive control allocation for constrained systems,” Automatica, Vol.121, Article No.109161, 2020. https://doi.org/10.1016/j.automatica.2020.109161
- [16] S. S. Tohidi, Y. Yildiz, and I. Kolmanovsky, “Adaptive control allocation for over-actuated systems with actuator saturation,” IFAC-PapersOnLine, Vol.50, Issue 1, pp. 5492-5497, 2017. https://doi.org/10.1016/j.ifacol.2017.08.1088
- [17] J. Tjønnås and T. A. Johansen, “Optimizing adaptive control allocation with actuator dynamics,” Modeling, Identification and Control J., Vol.29, No.2, pp. 69-76, 2008. http://dx.doi.org/10.4173/mic.2008.2.4
- [18] J. Tjønnås and T. A. Johansen, “On optimizing nonlinear adaptive control allocation with actuator dynamics,” IFAC Proc. Volumes, Vol.40, Issue 12, pp. 852-857, 2007. https://doi.org/10.3182/20070822-3-ZA-2920.00141
- [19] T. P. Nascimento and M. Saska, “Position and attitude control of multi-rotor aerial vehicles: A survey,” Annual Reviews in Control, Vol.48, pp. 129-146, 2019. https://doi.org/10.1016/j.arcontrol.2019.08.004
- [20] D. Lawrence and K. Mohseni, “Efficiency Analysis for Long Duration Electric MAVs,” American Institure of Aeronautics and Astronautics Infotech, Article No.7090, 2005. https://doi.org/10.2514/6.2005-7090
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.