Development Report:
Development of a UAV Flight Control Computer for High Altitude Environments and the Results of Observation Flights in Antarctica
Masataka Tsutsumi*, Shin-Ichiro Higashino*, and Masahiko Hayashi**

*Department of Aeronautics and Astronautics, Kyushu University
744 Motooka, Nishi-ku, Fukuoka, Fukuoka 819-0395, Japan
**Department of Earth System Science, Fukuoka University
8-19-1 Nanakuma, Jonan-ku, Fukuoka, Fukuoka 814-0180, Japan

The authors have been developing small fixed-wing unmanned aerial vehicles (UAVs) for use in various scientific observations. For example, in Antarctica, atmospheric observations have been conducted using a combination of a balloon and UAV. In Ethiopia, wide-area magnetic field observations have been conducted using a UAV capable of long-range flights. These UAVs are equipped with an in-house flight control computer and are capable of automatic flights. However, although approximately 20 years have passed since the development of this computer, issues such as inadequate computing power and memory as well as insufficient number of output ports for pulse width modulation signals remain, posing challenges when constructing complicated systems. To solve these problems, we developed a flight-control computer using a 32-bit microcontroller designed to conduct atmospheric observation missions in Antarctica and withstand low temperature environments down to -40°C. Aerosol observations and sample-return missions were conducted in Antarctica, and aerosol samples were successfully collected at an altitude of 27 km using the developed computer. This paper provides detailed descriptions of the developed flight control computer named “AP-CUB-G2” and the results of the atmospheric observation flight in Antarctica.
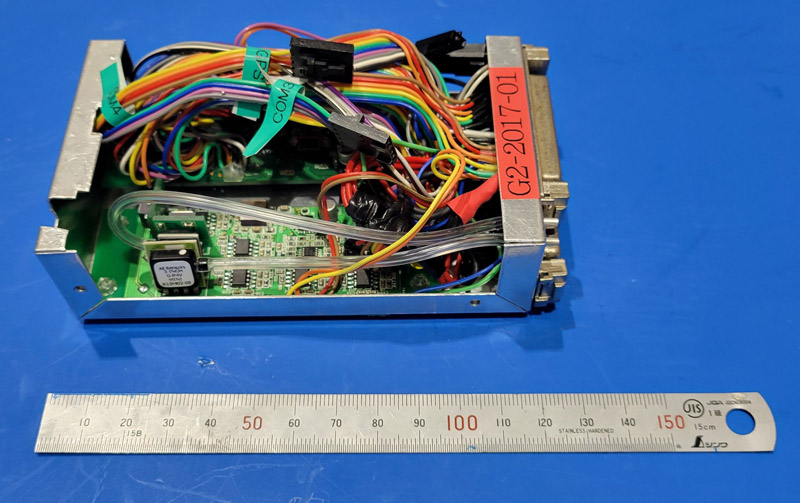
Newly developed flight control computer (AP-CUB-G2)
- [1] S. Higashino, M. Hayashi, S. Nagasaki, S. Umemoto, and M. Nishimura, “A balloon-assisted gliding UAV for aerosol observation in Antarctica,” Trans. of the Japan Society for Aeronautical and Space Sciences, Aerospace Technology Japan, Vol.12, No.APISAT-2013, pp. a35-a41, 2014. https://doi.org/10.2322/tastj.12.a35
- [2] S. Higashino, M. Hayashi, S. Nagasaki, T. Okada, and K. Ozuka, “A balloon-assisted gliding UAV for stratospheric aerosol observation using two-stage separation method in Antarctica,” 7th Asia-Pacific Int. Symp. on Aerospace Technology, 2015.
- [3] T. Okada et al., “High altitude aerosol observation system using a balloon-assisted gliding UAV in Antarctica,” Proc. of 52nd Aircraft Symp., Article No.1G05, 2014 (in Japanese).
- [4] S. Higashino, M. Hayashi, S. Nagasaki, and M. Nishimura, “An aerosol observation system using a motor glider UAV separated from a ballon,” Proc. of 49th Aircraft Symp., Article No.3FB, 2011 (in Japanese).
- [5] N. Ishikawa et al., “On-land exploration of a sea-floor spreading in Ethiopia: Summary report of geo-electromagnetic surveys at a divergent plate boundary in Afar Depression, Ethiopia,” Disaster Prevention Research Institute Annuals, Kyoto University, No.63B, pp. 93-99, 2020 (in Japanese).
- [6] S. Solomon, “Stratospheric ozone depletion: A review of concepts and history,” Reviews of Geophysics, Vol.37, No.3, pp. 275-316, 1999. https://doi.org/10.1029/1999RG900008
- [7] N. Kizu, M. Hayashi, T. Yamanouchi, Y. Iwasaka, and M. Watanabe, “Seasonal and annual variations of aerosol concentrations in the troposphere and stratosphere over Syowa Station observed by a balloon-borne optical particle counter,” Antarctic Record, Vol.54, Special Issue, pp. 760-778, 2010 (in Japanese).
- [8] S. Higashino, “Development of an UAV flight control module for the operation in Antarctica,” Proc. of the 5th Asian-Pacific Conf. on Aerospace Technology and Science, 2006.
- [9] S. Kozai, R. Yamamoto, S. Higashino, and M. Hayashi, “A study on a balloon-separated autonomous return UAS for atmospheric observations,” Proc. of 46th UAV Symp., Article No.1B12, 2008 (in Japanese).
- [10] C. Voth, and U.-L. Ly, “Design of a total energy control autopilot using constrained parameter optimization,” J. of Guidance, Control, and Dynamics, Vol.14, No.5, pp. 927-935, 1991. https://doi.org/10.2514/3.20733
- [11] L. Faleiro, “Total Energy Control System (TECS) feasibility exploration for the Aerospace Technology Demonstrator (ATD) using the DYMOLA physical modeling environment,” Technical Report TR R255-98, DLR berpfaffenhofen, 1998.
- [12] S. Ganguli and G. Balas, “A TECS alternative using robust multivariable control,” AIAA Guidance, Navigation, and Control Conf. and Exhibit, 2001. https://doi.org/10.2514/6.2001-4022
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.