Paper:
Development of Wall Hammering Inspection Systems Using Two-Wheeled Multi-Copters
Shuto Seki*, Keisuke Sugiura*, Satoshi Nakano*
 , Masao Watanabe**, and Manabu Yamada*
, Masao Watanabe**, and Manabu Yamada*
*Nagoya Institute of Technology
Gokiso-cho, Showa-ku, Nagoya, Aichi 466-8555, Japan
**Planning Office M&T Co., Ltd.
1-31-41 Sakae, Naka-ku, Nagoya, Aichi 466-0008, Japan

In this study, we investigated inspection robots that can safely, accurately, and quickly perform hammer sound inspections on tile exterior walls and present new wall hammering inspection systems using two-wheeled multi-copters. Our results yielded the following five advantages. First, the proposed multi-copter can use its wheels not only to move freely on the walls of buildings but also to overcome obstacles on the walls. Therefore, almost any tile wall surface can be inspected for hammering sound. Second, the multi-copter was equipped with both hammer-shaped rods to hit the tile exterior wall and microphones to collect the hammer sound of the tile, while moving quickly on the wall surface. Third, the wall hammering inspection systems can be used safely with a work assistance mechanism using a wire even in densely populated areas, such as urban areas, because the multi-copter has high wind resistance against crosswinds by both pushing against the wall and operating by the wire. Fourth, we presented some automatic control systems that make the multi-copter operation easy during hammering inspections and demonstrated its usefulness through experiments. Fifth, we proposed useful methods for detecting floating tiles based on the hammering results, conducted some outdoor flight experiments on building exterior walls, and demonstrated that floating tiles can be determined with high accuracy.
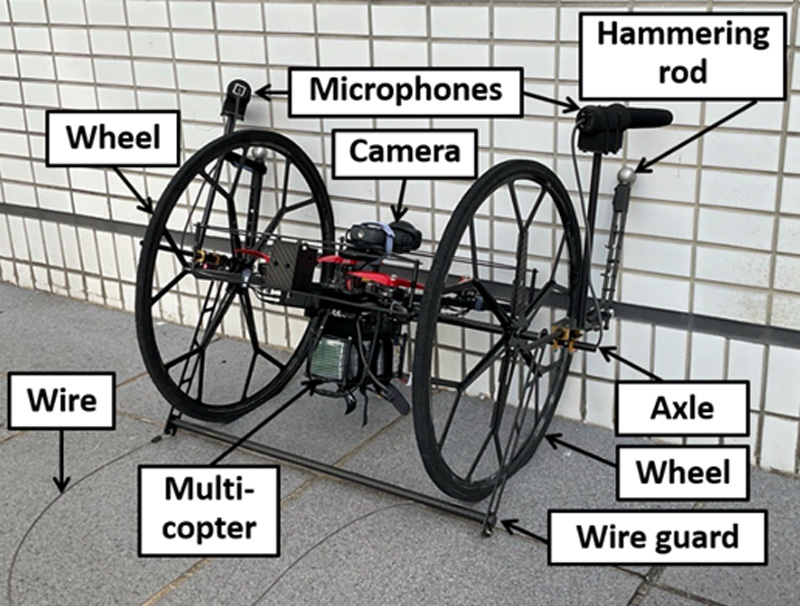
Two-wheeled multi-copter for wall inspection
- [1] K. Nemoto, “Mechanism of peeling and flaking of exterior tile finishing materials due to aging,” BRI-2007 Lecture Text, pp. 111-112, 2008 (in Japanese).
- [2] T. Soeta, Y. Tomita, H. Sasaki, and T. Mikami, “The effects of daily thermal fluctuation on the behavior of exterior tiles,” J. of Structural and Construction Engineering (Trans. of AIJ), Vol.78, No.694, pp. 2057-2064, 2013 (in Japanese). https://doi.org/10.3130/aijs.78.2057
- [3] Ministry of Land, Infrastructure, Transport and Tourism, “Matters to determine the items, methods, and result criteria for inspections in periodic building inspection reports and periodic inspections, as well as tables of inspection results,” Notification No.282, 2008 (in Japanese).
- [4] M. Makatayama, H. Tanano, and K. Nemoto, “Research on the diagnostic accuracy of the tile finish external wall by various measuring methods,” AIJ J. of Technical and Design, Vol.21, No.49, pp. 919-924, 2015 (in Japanese). https://doi.org/10.3130/aijt.21.919
- [5] K. Takemura, “Tile separation detecting robot,” J. of the Robotics Society of Japan, Vol.10, No.5, pp. 609-611, 1992 (in Japanese). https://doi.org/10.7210/jrsj.10.609
- [6] K. Endou, S. Nakamura, and Y. Yanagihara, “Development of automated inspection robot for wall tile,” Proc, of the 2007 JSME Conf. on Robotics and Mechatronics, Article No.1P1-L04, 2007 (in Japanese). https://doi.org/10.1299/jsmermd.2007._1P1-L04_1
- [7] S. Doi, “Research on quantitative diagnoses of outward tile separations by inspection robot,” Concrete J., Vol.53, No.5, pp. 474-479, 2015 (in Japanese). https://doi.org/10.3151/coj.53.474
- [8] H. Nachi, K. Funakoshi, and K. Takahashi, “A trial on hammering test using an automotive diagnostic system for tile facing at external walls,” Summaries of Technical Papers of Annual Meeting 2015, Japan Society for Finishings Technology, pp. 151-154, 2015 (in Japanese). https://doi.org/10.14820/finex.2015.0_36
- [9] Y. Okada and T. Okatani, “Development of UAV with passive rotating spherical shell for bridge inspection and its evaluation of inspection capability in real bridges,” J. of the Robotics Society of Japan, Vol.34, No.2, pp. 119-122, 2016 (in Japanese). https://doi.org/10.7210/jrsj.34.119
- [10] Y. Noma, K. Hayakawa, M. Kurodai, and T. Nishimura, “Image processing of crack by using image taken by UAV multicopter for concrete structure,” J. of the Remote Sensing Society of Japan, Vol.38, No.3, pp. 234-240, 2018 (in Japanese). https://doi.org/10.11440/rssj.38.234
- [11] S. Masada, S. Kawabe, and M. Watanabe, “Investigation of cracks in exterior wall tile finishes using multicopter aerial photography,” Architectural Institute of Japan Tokai Branch Research Report, Vol.53, pp. 5-8, 2015.
- [12] K. Hayakawa, S. Kawabe, M. Watanabe, K. Nakajima, and Y. Ito, “Investigation of cracks in exterior wall tile finishes using drone aerial photography,” Architectural Institute of Japan Tokai Branch Research Report, Vol.55, pp. 25-28, 2017.
- [13] T. Nakamura et al., “Multirotor for hammering test with wall adhesion based on universal vacuum gripper,” Trans. of the Society of Instrument and Control Engineers, Vol.54, No.4, pp. 440-446, 2018 (in Japanese). https://doi.org/10.9746/sicetr.54.440
- [14] S. Hishida, M. Oogaki, Y. Hishida, M. Miwa, and T. Shimizu, “Development of wall adhesion drone and proposal of its utilization method,” Technical J. of Advanced Mobility, Vol.4, No.1, pp. 2-10, 2023 (in Japanese). https://doi.org/10.34590/tjam.4.1_2
- [15] T. Sugimoto, K. Sugimoto, I. Uechi, N. Utagawa, and C. Kuroda, “Noncontact acoustic inspection of outer wall by acoustic irradiation induced vibration from UAV equipped with sound source,” Proc. of Meetings on Acoustics, Vol.38, Article No.065005, 2019. https://doi.org/10.1121/2.0001078
- [16] T. Sugimoto, K. Sugimoto, I. Uechi, N. Utagawa, and C. Kuroda, “Efficiency improvement of outer wall inspection by noncontact acoustic inspection method using sound source mounted type UAV,” 2019 IEEE Int. Ultrasonics Symp. (IUS), pp. 2091-2094, 2019. https://doi.org/10.1109/ULTSYM.2019.8925647
- [17] M. Makatayama, “Demonstration experiment of outer wall diagnosis method by infrared device using drone,” Concrete J., Vol.57, No.9, pp. 675-680, 2019 (in Japanese). https://doi.org/10.3151/coj.57.9_675
- [18] M. Makatayama et al., “Experiment using the buildings of external wall investigation using infrared thermography mounted on the drone,” AIJ J. of Technology and Design, Vol.27, No.65, pp. 75-80, 2021. https://doi.org/10.3130/aijt.27.75
- [19] M. Yamada et al., “Flying object with protection frame movable on land (and on water, if possible), and automatic charging device,” JP Patent 6982841, 2021.
- [20] M. Yamada, “Development and application of wheeled multicopter,” Science of Machine, Vol.69, No.10, pp. 819-829, 2017 (in Japanese).
- [21] N. Takahashi, S. Yamashita, Y. Sato, Y. Kutsuna, and M. Yamada, “All-round two wheeled quadrotor helicopters with protect-frames for air–land–sea vehicle (controller design and automatic charging device equipment),” Advanced Robotics, Vol.29, No.1, pp. 69-87, 2015. https://doi.org/10.1080/01691864.2014.991754
- [22] Y. Hada et al., “Development of a bridge inspection support system using two-wheeled multicopter and 3D modeling technology,” J. Disaster Res., Vol.12, No.3, pp. 593-607, 2017. https://doi.org/10.20965/jdr.2017.p0593
- [23] M. Yamada and S. Nakano, “Development of inspection system of bearing parts in bridges using two-wheeled multi-copters,” J. of the Japan Society of Applied Electromagnetics and Mechanics, Vol.30, No.3, pp. 297-302, 2022 (in Japnaese). https://doi.org/10.14243/jsaem.30.297
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.