Paper:
A Novel Tailsitter UAV with Configurable Wings
Shunsuke Yoshinaga, Akinori Sakaguchi†
 , and Kaoru Yamamoto
, and Kaoru Yamamoto
Graduate School and Faculty of Information Science and Electrical Engineering, Kyushu University
744 Motooka, Nishi-ku, Fukuoka, Fukuoka 819-0395, Japan
†Corresponding author

In this study, we propose a novel tailsitter unmanned aerial vehicle with configurable wings using a parallel link mechanism. It has two flight modes: a hover mode and a forward flight mode by pitching, similar to conventional tailsitters. In addition, it can deform its airframe in each flight mode. In the hover mode, it can tilt the frame in the pitch direction while hovering. In the forward flight mode, it can change the configuration of the wings during forward flight. In experiments, we show that it can transition from the hover mode to the forward flight mode with three wing configurations: non-staggered wings (biplane) and positively and negatively staggered wings (tandem wing plane), using an attitude controller for conventional quadrotors.
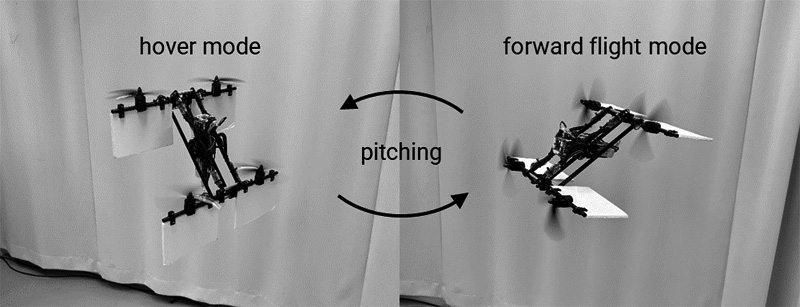
Configurable tailsitter with hover/flight modes
- [1] B. Crowther, A. Lanzon, M. Maya-Gonzalez, and D. Langkamp, “Kinematic analysis and control design for a nonplanar multirotor vehicle,” J. Guid. Control Dyn., Vol.34, No.4, pp. 1157-1171, 2011. https://doi.org/10.2514/1.51186
- [2] A. Sakaguchi, T. Takimoto, and T. Ushio, “A novel quadcopter with a tilting frame using parallel link mechanism,” Int. Conf. Unmanned Aircr. Syst., pp. 674-683, 2019. https://doi.org/10.1109/ICUAS.2019.8797934
- [3] K. Kawasaki, Y. Motegi, M. Zhao, K. Okada, and M. Inaba, “Dual connected bi-copter with new wall trace locomotion feasibility that can fly at arbitrary tilt angle,” IEEE/RSJ Int. Conf. Intell. Robots Syst., pp. 524-531, 2015. https://doi.org/10.1109/IROS.2015.7353422
- [4] P. Zheng, X. Tan, B. B. Kocer, E. Yang, and M. Kovac, “TiltDrone: A fully-actuated tilting quadrotor platform,” IEEE Robot. Autom. Lett., Vol.5, No.4, pp. 6845-6852, 2020. https://doi.org/10.1109/LRA.2020.3010460
- [5] M. Ryll, H. H. Bülthoff, and P. R. Giordano, “A novel overactuated quadrotor unmanned aerial vehicle: Modeling, control, and experimental validation,” IEEE Trans. Control Syst. Technol., Vol.23, No.2, pp. 540-556, 2015. https://doi.org/10.1109/TCST.2014.2330999
- [6] A. Oosedo et al., “Flight control systems of a quad tilt rotor unmanned aerial vehicle for a large attitude change,” IEEE Int. Conf. Robot. Autom., pp. 2326-2331, 2015. https://doi.org/10.1109/ICRA.2015.7139508
- [7] A. B. Junaid, A. D. D. C. Sanchez, J. B. Bosch, N. Vitzilaios, and Y. Zweiri, “Design and implementation of a dual-axis tilting quadcopter,” Robotics, Vol.7, No.4, Article No.65, 2018. https://doi.org/10.3390/robotics7040065
- [8] V. Riviere, A. Manecy, and S. Viollet, “Agile robotic fliers: A morphing-based approach,” Soft Robot., Vol.5, No.5, pp. 541-553, 2018. https://doi.org/10.1089/soro.2017.0120
- [9] A. Desbiez et al., “X-Morf: A Crash-separable quadrotor that morfs its X-geometry in flight,” Workshop Res. Educ. Dev. Unmanned Aer. Syst., pp. 222-227, 2017. https://doi.org/10.1109/RED-UAS.2017.8101670
- [10] D. Falanga, K. Kleber, S. Mintchev, D. Floreano, and D. Scaramuzza, “The foldable drone: A morphing quadrotor that can squeeze and fly,” IEEE Robot. Autom. Lett., Vol.4, No.2, pp. 209-216, 2019. https://doi.org/10.1109/LRA.2018.2885575
- [11] T. Fukuda, A. Sakaguchi, T. Takimoto, and T. Ushio, “Modeling and stabilization of the novel quadrotor with tilting propeller,” 2016 Int. Symp. Nonlinear Theory Appl., pp. 173-176, 2016. https://doi.org/10.34385/proc.48.A3L-E-4
- [12] A. Sakaguchi and K. Yamamoto, “A novel quadrotor with a 3-axis deformable frame using tilting motions of parallel link modules without thrust loss,” IEEE Robot. Autom. Lett., Vol.7, No.4, pp. 9581-9588, 2022. https://doi.org/10.1109/LRA.2022.3191195
- [13] V. Hrishikeshavan, C. Bogdanowicz, and I. Chopra, “Design, performance and testing of a quad rotor biplane micro air vehicle for multi role missions,” Int. J. Micro Air Veh., Vol.6, No.3, pp. 155-173, 2014. https://doi.org/10.1260/1756-8293.6.3.155
- [14] A. Oosedo, S. Abiko, A. Konno, and M. Uchiyama, “Optimal transition from hovering to level-flight of a quadrotor tail-sitter UAV,” Auton. Robots, Vol.41, No.5, pp. 1143-1159, 2017. https://doi.org/10.1007/s10514-016-9599-4
- [15] Z. Qiao et al., “A comprehensive design and experiment of a biplane quadrotor tail-sitter UAV,” Drones, Vol.7, No.5, Article No.292, 2023. https://doi.org/10.3390/drones7050292
- [16] D. D. North, R. C. Busan, and G. Howland, “Design and fabrication of the LA-8 distributed electric propulsion VTOL testbed,” AIAA SciTech 2021 Forum, 2021. https://doi.org/10.2514/6.2021-1188
- [17] J. Winslow, H. Otsuka, B. Govindarajan, and I. Chopra, “Basic understanding of airfoil characteristics at low Reynolds numbers (104–105),” J. Aircr., Vol.55, No.3, pp. 1050-1061, 2018. https://doi.org/10.2514/1.C034415
- [18] D. Brescianini, M. Hehn, and R. D’Andrea, “Nonlinear quadrocopter attitude control,” Technical Report, Institute for Dynamic Systems and Control, ETH Zürich, 2013. https://doi.org/10.3929/ethz-a-009970340
- [19] J.-M. Moschetta and C. Thipyopas, “Aerodynamic performance of a biplane micro air vehicle,” J,. Aircr., Vol.44, No.1, pp. 291-299, 2007. https://doi.org/10.2514/1.23286
- [20] H. Kang, N. Genco, and A. Altman, “Empirically derived biplane lift as a function of gap and stagger,” J. Aircr., Vol.50, No.1, pp. 292-298, 2013. https://doi.org/10.2514/1.C031111
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.