Paper:
Robust PI Control for Lower Limb Exoskeleton Robot Based on the Moth Flame Optimization Algorithm
Lie Yu*
 , Cong Zhang*
, and Lei Ding**
, Cong Zhang*
, and Lei Ding**
*School of Electronic and Electrical Engineering, Wuhan Textile University
No.1 Sunshine Avenue, Jiangxia District, Wuhan, Hubei 430200, China
**School of Computer Science and Artificial Intelligence, Wuhan Textile University
No.1 Sunshine Avenue, Jiangxia District, Wuhan, Hubei 430200, China

The purpose of this paper is to apply an intelligent algorithm to conduct the torque tracking control for lower limb exoskeleton robot driven by an electro-hydraulic servo system (EHSS). The dynamics of EHSS actuating the robot are mathematically modeled with two degrees of freedom joints, and the torque control strategy is made to realize the minimization of human-machine forces. The PI controller is selected to implement this strategy, and the selection of PI gains is important for system control. Therefore, the ameliorative moth flame optimization (AMFO) algorithm is chosen to optimize the PI gains. The main idea of moth flame optimization is to mimic the evolution of a moth’s lateral positioning mechanism over time. The AMFO algorithm is capable of achieving enhanced better global and local search capabilities by adding the inertia weights to the position update formula. Moreover, the particle swarm optimization (PSO) and whale optimization algorithm (WOA) are selected to obtain comparative results. The results indicate that, when compared to the WOA-PI and PSO-PI controllers, the AMFO-PI controller gains the least amount in terms of rise time, overshoot, steady error, mean absolute error, and root mean square error.
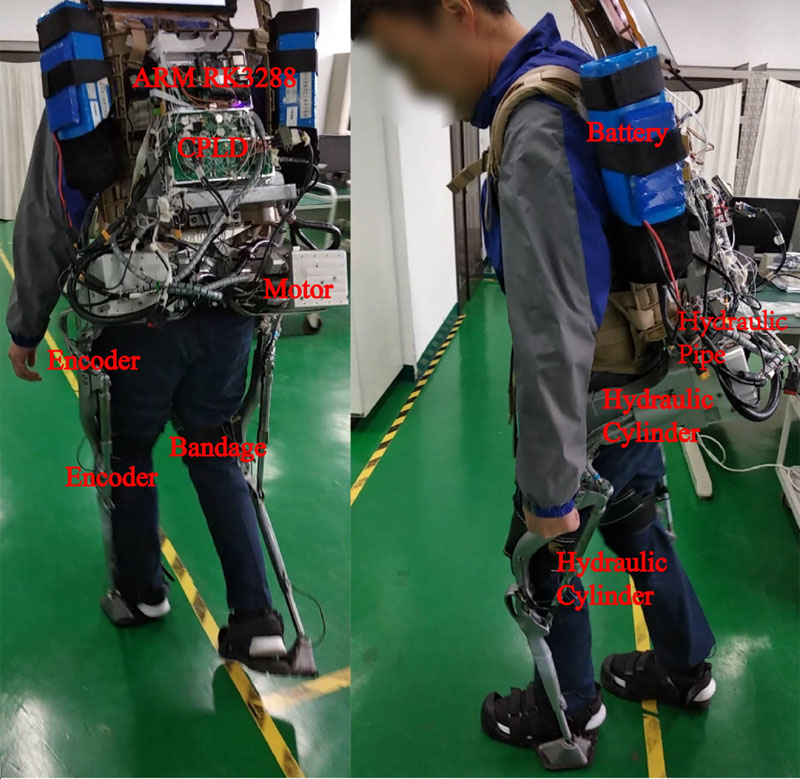
Lower limb exoskeleton robot
- [1] B. Chen et al., “Sit-to-Stand and Stand-to-Sit Assistance for Paraplegic Patients with CUHK-EXO Exoskeleton,” Robotica, Vol.36, No.4, pp. 535-551, 2017. https://doi.org/10.1017/S0263574717000546
- [2] C. Khazoom, P. Caillouette, A. Girard, and J.-S. Plante, “A Supernumerary Robotic Leg Powered by Magnetorheological Actuators to Assist Human Locomotion,” IEEE Robotics and Automation Letters, Vol.5, No.4, pp. 5143-5150, 2020. https://doi.org/10.1109/LRA.2020.3005629
- [3] Y. Dan, Y. Ge, A. Wang, and Z. Li, “Human-Gait-Based Tracking Control for Lower Limb Exoskeleton Robot,” J. Robot. Mechatron., Vol.34, No.3, pp. 615-621, 2022. https://doi.org/10.20965/jrm.2022.p0615
- [4] A. A. H. Ibrahim et al., “Hydraulic Robotic Leg for HYDROïD Robot: Modeling and Control,” J. Robot. Mechatron., Vol.34, No.3, pp. 576-587, 2022. https://doi.org/10.20965/jrm.2022.p0576
- [5] H. Zhong, X. Li, L. Gao, and C. Li, “Toward Safe Human–Robot Interaction: A Fast- Response Admittance Control Method for Series Elastic Actuator,” IEEE Trans. on Automation Science and Engineering, Vol.19, No.2, pp. 919-932, 2022. https://doi.org/10.1109/TASE.2021.3057883
- [6] Z. Yao, J. Yao, and W. Sun, “Adaptive RISE Control of Hydraulic Systems with Multilayer Neural-Networks,” IEEE Trans. on Industrial Electronics, Vol.66, No.11, pp. 8638-8647, 2019. https://doi.org/10.1109/TIE.2018.2886773
- [7] M. H. Nguyen, H. V. Dao, and K. K. Ahn, “Active Disturbance Rejection Control for Position Tracking of Electro-Hydraulic Servo Systems under Modeling Uncertainty and External Load,” Actuators, Vol.10, No.2, Article No.20, 2021. https://doi.org/10.3390/act10020020
- [8] Y. Fang et al., “A Stepper Motor-Powered Lower Limb Exoskeleton with Multiple Assistance Functions for Daily Use by the Elderly,” J. Robot. Mechatron., Vol.35, No.3, pp. 601-611, 2023. https://doi.org/10.20965/jrm.2023.p0601
- [9] I. D. Díaz-Rodríguez, S. Han, and S. P. Bhattacharyya, “Analytical Design of PID Controllers,” Springer, 2019. https://doi.org/10.1007/978-3-030-18228-1
- [10] Y. Zhang, L. Zhang, and Z. Dong, “An MEA-Tuning Method for Design of the PID Controller,” Mathematical Problems in Engineering, Vol.2019, Article No.1378783, 2019. https://doi.org/10.1155/2019/1378783
- [11] X. Yang, X. Chen, R. Xia, and Z. Qian, “Wireless Sensor Network Congestion Control Based on Standard Particle Swarm Optimization and Single Neuron PID,” Sensors, Vol.18, No.4, Article No.1265, 2018. https://doi.org/10.3390/s18041265
- [12] J. G. Ziegler and N. B. Nichols, “Optimum Settings for Automatic Controllers,” J. of Dynamic Systems, Measurement, and Control, Vol.115, No.2B, pp. 220-222, 1993. https://doi.org/10.1115/1.2899060
- [13] B. Zhao, H. Wang, Q. Li, J. Li, and Y. Zhao, “PID Trajectory Tracking Control of Autonomous Ground Vehicle Based on Genetic Algorithm,” 2019 Chinese Control and Decision Conf. (CCDC), pp. 3677-3682, 2019. https://doi.org/10.1109/CCDC.2019.8832531
- [14] S. Mirjalili, “Genetic Algorithm,” S. Mirjalili (Ed.), “Evolutionary Algorithms and Neural Networks: Theory and Applications,” pp. 43-55, Springer, 2019. https://doi.org/10.1007/978-3-319-93025-1_4
- [15] A. Mukhtar, V. K. Tayal, and H. P. Singh, “PSO Optimized PID Controller Design for the Process Liquid Level Control,” 2019 3rd Int. Conf. on Recent Developments in Control, Automation & Power Engineering (RDCAPE), pp. 590-593, 2019. https://doi.org/10.1109/RDCAPE47089.2019.8979108
- [16] J. C. Bansal, “’Particle Swarm Optimization,” J. C. Bansal, P. K. Singh, and N. R. Pal (Eds.), “Evolutionary and Swarm Intelligence Algorithms,” pp. 11-23, Springer, 2019. https://doi.org/10.1007/978-3-319-91341-4_2
- [17] F. S. Gharehchopogh and H. Gholizadeh, “A Comprehensive Survey: Whale Optimization Algorithm and its Applications,” Swarm and Evolutionary Computation, Vol.48, pp. 1-24, 2019. https://doi.org/10.1016/j.swevo.2019.03.004
- [18] Q.-V. Pham, S. Mirjalili, N. Kumar, M. Alazab, and W.-J. Hwang, “Whale Optimization Algorithm with Applications to Resource Allocation in Wireless Networks,” IEEE Trans. on Vehicular Technology, Vol.69, No.4, pp. 4285-4297, 2020. https://doi.org/10.1109/TVT.2020.2973294
- [19] S. Mirjalili, “Moth-Flame Optimization Algorithm: A Novel Nature-Inspired Heuristic Paradigm,” Knowledge-Based Systems, Vol.89, pp. 228-249, 2015. https://doi.org/10.1016/j.knosys.2015.07.006
- [20] S. Sapre and S. Mini, “Emulous Mechanism Based Multi-Objective Moth–Flame Optimization Algorithm,” J. of Parallel and Distributed Computing, Vol.150, pp. 15-33, 2021. https://doi.org/10.1016/j.jpdc.2020.12.010
- [21] O. H. Ahmed et al., “Using Differential Evolution and Moth-Flame Optimization for Scientific Workflow Scheduling in Fog Computing,” Applied Soft Computing, Vol.112, Article No.107744, 2021.
- [22] P. Singh and S. K. Bishnoi, “Modified Moth-Flame Optimization for Strategic Integration of Fuel Cell in Renewable Active Distribution Network,” Electric Power Systems Research, Vol.197, Article No.107323, 2021. https://doi.org/10.1016/j.epsr.2021.107323
- [23] A. Sharma et al., “Improved moth flame optimization algorithm based on opposition-based learning and Lévy flight distribution for parameter estimation of solar module,” Energy Reports, Vol.8, pp. 6576-6592, 2022. https://doi.org/10.1016/j.egyr.2022.05.011
- [24] X. Zhao, Y. Fang, S. Ma, and Z. Liu, “Multi-Swarm Improved Moth–Flame Optimization Algorithm with Chaotic Grouping and Gaussian Mutation for Solving Engineering Optimization Problems,” Expert Systems with Applications, Vol.204, Article No.117562, 2022. https://doi.org/10.1016/j.eswa.2022.117562
- [25] M. S. Shaikh, S. Raj, R. Babu, S. Kumar, and K. Sagrolikar, “A Hybrid Moth–Flame Algorithm with Particle Swarm Optimization with Application in Power Transmission and Distribution,” Decision Analytics J., Vol.6, Article No.100182, 2023. https://doi.org/10.1016/j.dajour.2023.100182
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.