Paper:
Development of Driving Robot and Driver Model Applied Regenerative Brake Control of Electrified Vehicles
Nobunori Okui
National Traffic Safety and Environment Laboratory
7-42-27 Jindaiji-higashi, Chofu, Tokyo 182-0012, Japan

Real driving emissions (RDE) test procedures for type approval were initiated in Japan in 2022. In Japan, the test vehicle is driven on a test road (test course) by tracing the speed pattern prepared for each RDE test. The vehicle needs to trace the patterns in the same manner as in the conventional chassis dynamometer test. The use of a driving robot is effective for reproducibility in precisely tracing the target vehicle speed during these tests. In this study, we developed a driving robot for electrified vehicles (HEV, plug-in HEV, BEV, and FCV), which have regenerative brake-control systems. We applied a new logic to our robot that was developed in-house for conventional engine vehicles. We focused on braking deceleration of the regenerative brake control to change the operation timing from the accelerator pedal to the brake pedal. We verified the improvement of speed traceability of the driving robot installed with the proposed logic on the chassis dynamometer and test road.
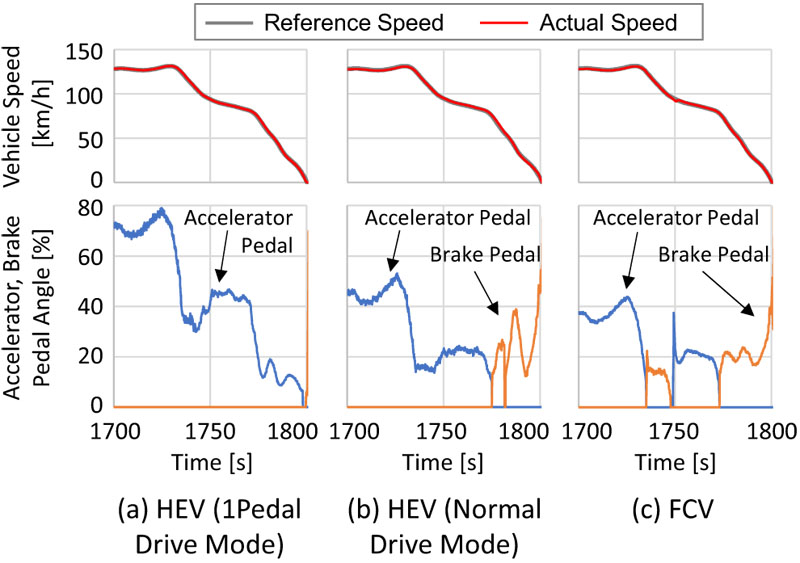
Driving robot operation with pedal-changing logic
- [1] W. Thiel, S. Gröf, G. Hohenberg, and B. Lenzen, “Investigations on Robot Drivers for Vehicle Exhaust Emission Measurements in Comparison to the Driving Strategies of Human Drivers,” SAE Technical Paper No.982642, 1998. https://doi.org/10.4271/982642
- [2] Y. Sugihara, Y. Hirose, K. Furukawa, and Y. Ogawa, “Improved Method to Realize Load Simulation for Engine Test,” Proc. of the 2016 JSAE Annual Congress (Autumn), pp. 2083-2087, 2016 (in Japanese).
- [3] N. Mizutani, H. Matsui, K. Yano, and T. Takahashi, “Vehicle Speed Control by a Robotic Driver Considering Vehicle Dynamics for Continuously Variable Transmissions,” J. Robot. Mechatron., Vol.30, No.2, pp. 300-310, 2018. https://doi.org/10.20965/jrm.2018.p0300
- [4] K. Yoshida, H. Fukai, M. Niwakawa, and M. Kanke, “Adopted the technology of Artificial Intelligence (AI) for Drive Robot,” Meiden Review, Vol.364, No.3, pp. 47-52, 2019 (in Japanese).
- [5] M. Okamoto, S. Morimoto, M. Ohashi, and K. Uchida, “Automobile Gear-Shift Control Including Driver Behavior by Just-in-Time Modeling,” Trans. of the Society of Instrument and Control Engineers, Vol.10, No.3, pp. 17-26, 2011 (in Japanese).
- [6] M. Kano et al., “Development of a Driver Behavior Model,” Proc. of the 4th ITS Symp., pp. 251-256, 2005 (in Japanese).
- [7] D. A. Coovert et al., “Design and Operation of a Brake and Throttle Robot,” Passenger Cars – Mechanical Systems, Vol.2, No.1, pp. 613-621, 2009. https://doi.org/10.4271/2009-01-0429
- [8] A. Andersson, P. Nyberg, H. Sehammar, and P. Öberg, “Vehicle Powertrain Test Bench Co-Simulation with a Moving Base Simulator Using a Pedal Robot,” Passenger Cars – Electronic and Electrical Systems, Vol.6, No.1, pp. 169-179, 2013. https://doi.org/10.4271/2013-01-0410
- [9] D. Lee et al., “Development of a Driving Pedal Robot for Indoor Chassis Dynamometer Testing,” SAE Technical Paper No.2024-01-2268, 2024. https://doi.org/10.4271/2024-01-2268
- [10] N. Okui, “Effects of the Differences in Driving Behavior on Fuel Economy and Emission Characteristics During Vehicle Simulator Execution,” SAE Technical Paper No.2018-01-1768, 2018. https://doi.org/10.4271/2018-01-1768
- [11] N. Okui and M. Kobayashi, “Study of New HILS Test Method with Combination of the Virtual Hybrid Electric Powertrain Systems and the Engine Test Bench,” SAE Int. J. of Advances and Current Practices in Mobility, Vol.2, No.1, pp. 472-483, 2020. https://doi.org/10.4271/2019-01-2343
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.