Paper:
Filtering Function to Mitigate the Impact of Cyber Attacks in Cooperative Adaptive Cruise Control
Takuma Fujimoto*, Kenji Sawada*
 , Yuki Minami**
, and Katsuhiko Sando***
, Yuki Minami**
, and Katsuhiko Sando***
*The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan
**Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan
***Nissan Technical Center, Nissan Motor Co., Ltd.
560-2 Okatsukoku, Atsugi, Kanagawa 243-0192, Japan

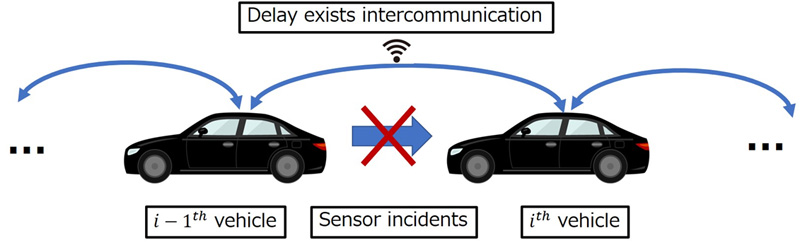
Among automated driving technologies, adaptive cruise control (ACC), which controls the distance between vehicles and their relative speed, is becoming popular. Cooperative ACC (CACC) uses vehicle-to-vehicle communication and sensors to control the distance between vehicles. Recently, cyber attacks against automated driving systems have been a focus, in which information on pedestrians or preceding vehicles obtained from LiDAR and sensors is disguised. Such cyber attacks enable attackers to obtain accurate information on preceding vehicles and pedestrians. This can result in accidents. The purpose of this study is to develop a filtering function to reduce the impact of cyber attacks using available information. The contribution lies in proposing a filtering function for situations in which sensor offsets and communication delays arise owing to cyber attacks.
Optimal filtering for CACC attacks
- [1] M. J. R. Perrier, T. L. Louw, and O. Carsten, “User-centred design evaluation of symbols for adaptive cruise control (ACC) and lane-keeping assistance (LKA),” Cognition, Technology & Work, Vol.23, No.4, pp. 685-703, 2021. https://doi.org/10.1007/s10111-021-00673-0
- [2] Y. Arai, T. Sago, Y. Ueyama, and M. Harada, “MGV obstacle avoidance trajectory generation considering vehicle shape,” J. Robot. Mechatron., Vol.35, No.2, pp. 262-270, 2023. https://doi.org/10.20965/jrm.2023.p0262
- [3] S. Nishimura and M. Omae, “Study on control for prevention of collision caused by failure of localization for map-based automated driving vehicle,” J. Robot. Mechatron., Vol.35, No.2, pp. 255-261, 2023. https://doi.org/10.20965/jrm.2023.p0255
- [4] K. Sato and K. Sawada, “Continuous-time receding-horizon estimation via primal-dual dynamics on vehicle path-following control,” J. Robot. Mechatron., Vol.35, No.2, pp. 298-307, 2023. https://doi.org/10.20965/jrm.2023.p0298
- [5] S. P. Godse, S. R. Patil, D. D. Shelke, and V. T. Chavan, “Literature survey on co-operative adaptive cruise control,” Int. Research J. of Engineering and Technology, Vol.4, No.12, pp. 242-244, 2017.
- [6] W. Ko and D. E. Chang, “Cooperative adaptive cruise control using turn signal for smooth and safe cut-in,” 2018 18th Int. Conf. on Control, Automation and Systems (ICCAS), pp. 807-812, 2018.
- [7] Z. Tang, L. Xu, G. Yin, and H. Liu, “L2 string stability of heterogeneous platoon under disturbances and information delays,” 2019 Chinese Control and Decision Conf. (CCDC), pp. 5472-5477, 2019. https://doi.org/10.1109/CCDC.2019.8832464
- [8] M. R. Hidavatullah, J.-C. Juang, Z.-H. Fang, and W.-H. Chang, “Heterogeneous platooning vehicle with robust sensor fault detection and estimation,” 2020 Int. Symp. on Computer, Consumer and Control (IS3C), pp. 436-439, 2020. https://doi.org/10.1109/IS3C50286.2020.00118
- [9] Z. Jin et al., “PLA-LiDAR: Physical laser attacks against LiDAR-based 3D object detection in autonomous vehicle,” 2023 IEEE Symp. on Security and Privacy (SP), pp. 1822-1839, 2023. https://doi.org/10.1109/SP46215.2023.10179458
- [10] Y. Cao et al., “You can’t see me: Physical removal attacks on LiDAR-based autonomous vehicles driving frameworks,” Proc. of the 32nd USENIX Conf. on Security Symp. (SEC’23), pp. 2993-3010, 2023.
- [11] M. Sun, A. Al-Hashimi, M. Li, and R. Gerdes, “Impacts of constrained sensing and communication based attacks on vehicular platoons,” IEEE Trans. on Vehicular Technology, Vol.69, No.5, pp. 4773-4787, 2020. https://doi.org/10.1109/TVT.2020.2981003
- [12] Y. Minami and S. Azuma, “Prediction governors: Optimal solutions and application to electric power balancing control,” IET Control Theory & Applications, Vol.15, No.10, pp. 1375-1388, 2021. https://doi.org/10.1049/cth2.12129
- [13] T. Fujimoto and K. Sawada, “On multi-rate prediction governor for CACC system with sensor errors and communication delays,” IFAC-PapersOnline, Vol.56, No.2, pp. 4883-4888, 2023. https://doi.org/10.1016/j.ifacol.2023.10.1259
- [14] D. L. Luu, C. Lupu, L. S. Ismail, and H. Alshareefi, “Spacing control of cooperative adaptive cruise control vehicle platoon,” 2020 IEEE Int. Conf. on Automation, Quality and Testing, Robotics (AQTR), 2020. https://doi.org/10.1109/AQTR49680.2020.9129997
- [15] C.-Y. Liang and H. Peng, “String stability analysis of adaptive cruise controlled vehicles,” JSME Int. J., Series C: Mechanical Systems, Machine Elements and Manufacturing, Vol.43, No.3, pp. 671-677, 2000. https://doi.org/10.1299/jsmec.43.671
- [16] X. Ge, Q.-L. Han, Q. Wu, and X.-M. Zhang, “Resilient and safe platooning control of connected automated vehicles against intermittent denial-of-service attacks,” IEEE/CAA J. of Automatica Sinica, Vol.10, No.5, pp. 1234-1251, 2023. https://doi.org/10.1109/JAS.2022.105845
- [17] D. Zhang, Y.-P. Shen, S.-Q. Zhou, X.-W. Dong, and L. Yu, “Distributed secure platoon control of connected vehicles subject to DoS attack: Theory and application,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, Vol.51, No.11, pp. 7269-7278, 2021. https://doi.org/10.1109/TSMC.2020.2968606
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.