Paper:
Automatic Route Design by Stepwise Subdivision of Virtual Walls —Reduces Route Length and Speeds Up Execution Time—
Yuki Itoh*, Junya Hoshino*, Tenta Suzuki*, Kenji Matsuda*, Kaito Kumagae*, Mao Tobisawa*, Tomohiro Harada**
 , Jyouhei Matsuoka*
, Toshinori Kagawa***, and Kiyohiko Hattori*
, Jyouhei Matsuoka*
, Toshinori Kagawa***, and Kiyohiko Hattori*
*Tokyo University of Technology
1404-1 Katakuramachi, Hachioji, Tokyo 192-0982, Japan
**Saitama University
255 Shimo-Okubo, Sakura-ku, Saitama, Saitama 338-8570, Japan
***Central Research Institute of Electric Power Industry
2-6-1 Nagasaka, Yokosuka, Kanagawa 240-0196, Japan

With the development of autonomous driving technology utilizing machine learning, AI, and sensors, research on autonomous driving control has become more active, and a large number of innovative studies are underway. In the near future, all autonomous vehicle fleets will be able to communicate with each other for sharing information and overall optimal traffic control will be achieved. One of the vehicle control systems that are based on the premise of such a fully automated society is the “signal-less intersection.” There is an intersection traffic control method that achieves safe and rational route selection by using virtual walls (VWs), which are virtual obstacles, but there are issues in terms of total route length and reduction of computation time. To address the issues, we propose a method that (1) prunes unneeded paths and (2) arranges VWs in a stepwise manner. The effectiveness of the proposed method was evaluated by simulation, and the results showed that the total route length and execution time were reduced.
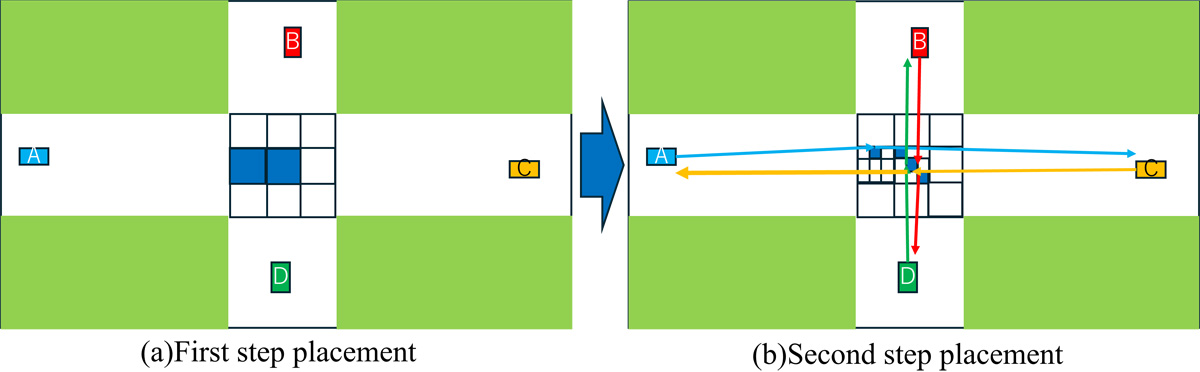
Example of traffic control in a two-steps VW
- [1] E. Marti, M. A. de Miguel, F. Garcia, and J. Perez, “A review of sensor technologies for perception in automated driving,” IEEE Intelligent Transportation Systems Magazine, Vol.11, No.4, pp. 94-108, 2019. https://doi.org/10.1109/MITS.2019.2907630
- [2] Y. Wu, L. Wu, and H. Cai, “A deep learning approach to secure vehicle to road side unit communications in intelligent transportation system,” Computers and Electrical Engineering, Vol.105, Article No.108542, 2023. https://doi.org/10.1016/j.compeleceng.2022.108542
- [3] S. Zeadally, J. Guerrero, and J. Contreras, “A tutorial survey on vehicle-to-vehicle communications,” Telecommunication Systems, Vol.73, No.3, pp. 469-489, 2020. https://doi.org/10.1007/s11235-019-00639-8
- [4] R. Saotome, K. Hattori, J. Matsuoka, and T. Harada, “Proposal of signal-less intersection control with dynamic obstacles optimized by using genetic algorithm — A concept of virtual walls –,” 6th Int. Symp. on Swarm Behavior and Bio-Inspired Robotics, pp. 1517-1522, 2023.
- [5] I. Ogawa et al., “Proposal of cooperative learning to realize motion control of RC cars group by Deep Q-network,” Proc. of the 31st Annual Conf. of Japanese Society for Artificial Intelligence, Article No.3I2-OS-13b-5, 2017 (in Japanese). https://doi.org/10.11517/pjsai.JSAI2017.0_3I2OS13b5
- [6] I. Ogawa et al., “Efficiency of traffic flow with mutual concessions of autonomous cars using deep Q-network,” Proc. of the 32nd Annual Conf. of Japanese Society for Artificial Intelligence, Article No.3Z2-04, 2018. https://doi.org/10.11517/pjsai.JSAI2018.0_3Z204
- [7] A. Pal, J. Philion, Y.-H. Liao, and S. Fidler, “Emergent road rules in multi-agent driving environments,” 9th Int. Conf. on Learning Representations (ICLR 2021), 2021.
- [8] J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,” arXiv:1707.06347, 2017. https://doi.org/10.48550/arXiv.1707.06347
- [9] H. Shimada, A. Yamaguchi, H. Takada, and K. Sato, “Implementation and evaluation of local dynamic map in safety driving systems,” J. of Transportation Technologies, Vol.5, No.2, pp. 102-112, 2015. http://dx.doi.org/10.4236/jtts.2015.52010
- [10] Y. Kishi, W. Cao, and M. Mukai, “Study on the formulation of vehicle merging problems for model predictive control,” Artificial Life Robotics, Vol.27, No.3, pp. 513-520, 2022. https://doi.org/10.1007/s10015-022-00751-0
- [11] T. Harada, J. Matsuoka, and K. Hattori, “Behavior analysis of emergent rule discovery for cooperative automated driving using deep reinforcement learning,” Artificial Life and Robotics, Vol.28, No.1, pp. 31-42, 2023. https://doi.org/10.1007/s10015-022-00839-7
- [12] M. O. Sayin, C.-W. Lin, S. Shiraishi, J. Shen, and T. Başar, “Information-driven autonomous intersection control via incentive compatible mechanisms,” IEEE Trans. on Intelligent Transportation Systems, Vol.20, No.3, pp. 912-924, 2019. https://doi.org/10.1109/TITS.2018.2838049
- [13] R. Tachet et al., “Revisiting street intersections using slot-based systems,” PLOS ONE, Vol.11, No.3, Article No.e0149607, 2016. https://doi.org/10.1371/journal.pone.0149607
- [14] A. Patwardhan, R. Murai, and A. J. Davison, “Distributing collaborative multi-robot planning with Gaussian belief propagation,” IEEE Robotics and Automation Letters, Vol.8, No.2, pp. 552-559, 2023. https://doi.org/10.1109/LRA.2022.3227858
- [15] K. Okumura and X. Défago, “Solving simultaneous target assignment and path planning efficiently with time-independent execution,” Artificial Intelligence, Vol.321, Article No.103946, 2023. https://doi.org/10.1016/j.artint.2023.103946
- [16] M. de Berg, M. van Kreveld, M. Overmars, and O. C. Schwarzkopf, “Visibility graphs: Finding the shortest route,” M. de Berg, M. van Kreveld, M. Overmars, and O. C. Schwarzkopf, “Computational Geometry: Algorithms and Applications,” 2nd Edition, pp. 307-317, Springer, 2000. https://doi.org/10.1007/978-3-662-04245-8_15
- [17] Y. Takahashi, H. Sawano, and H. Ozaki, “A study on setting clearance intervals depending on geometry of signalized intersections,” Proc. of Infrastructure Planning, Vol.36, 2007.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.